
厘米级实时定位在自动驾驶、精准农业和无人机测绘等领域至关重要。Micro-Magic 的 I3700 双天线 GNSS/INS 系统通过克服信号遮挡等限制,增强了 RTK 技术,从而在复杂环境中实现精准可靠的导航。该系统凭借其强大的定位能力,为下一代应用提供强大支持。
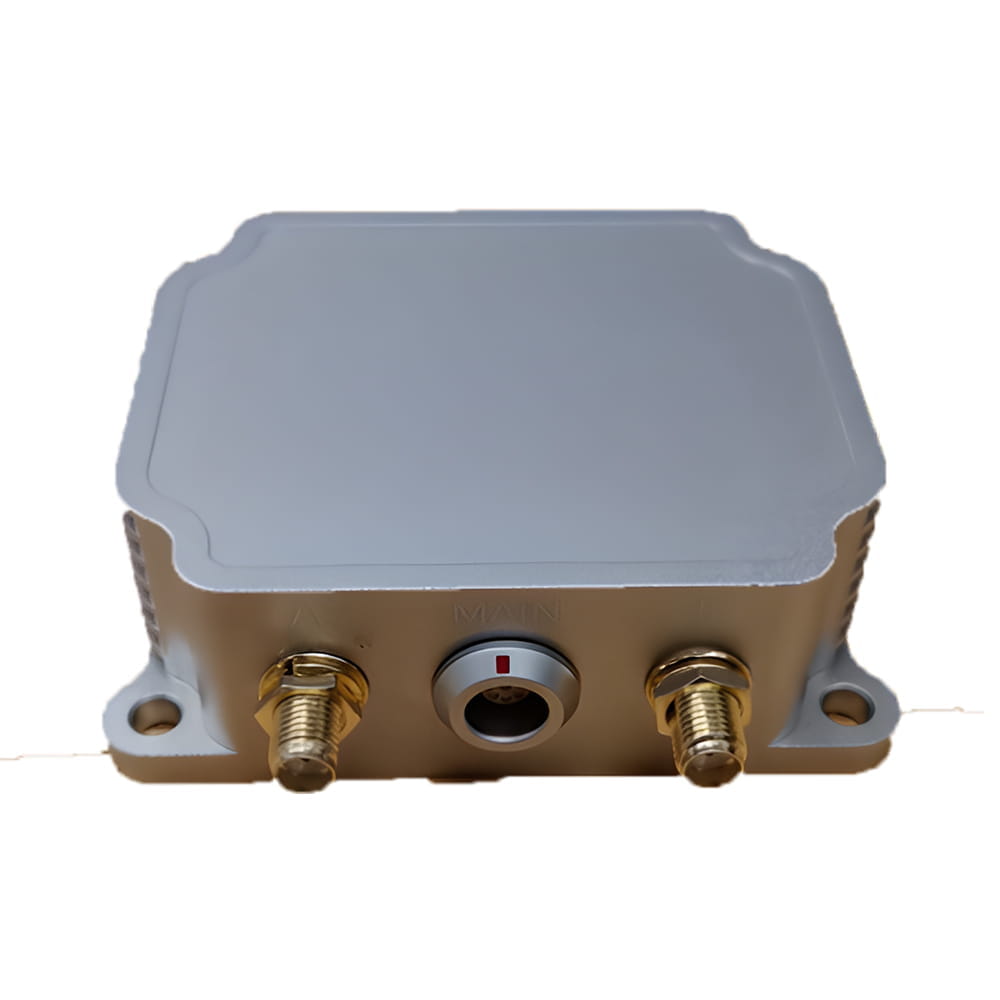
在自动驾驶、精准农业和无人机测绘等数字化驱动领域,厘米级实时定位已成为核心需求。实时动态定位(RTK)技术通过基站与流动站的协同工作,将传统GPS定位误差从米级降低到厘米级。Micro-Magic公司推出的I3700高性能双天线GNSS/INS集成导航系统,赋予RTK更强的环境适应性和可靠性,开启了高精度定位的新时代。
RTK系统通过基站与流动站的协同作用实现精确定位:
基站:位于已知坐标处,可计算实时卫星信号误差(例如,大气延迟、时钟漂移)。
漫游车:接收来自基站的误差校正数据,并将其与自身观测数据融合,实现厘米级定位。
实时性能:通过 4G/NTRIP 协议进行数据传输 <20毫秒延迟
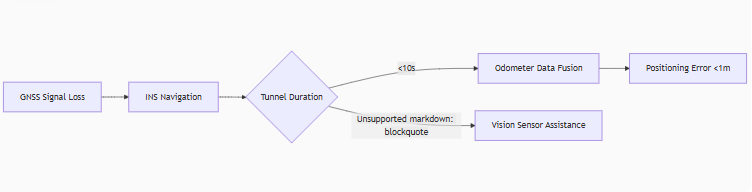
技术瓶颈:传统 RTK 在信号遮挡(隧道、城市峡谷)下失效,无法提供载波姿态数据。
作为一款集成了双天线GNSS+惯性导航(INS)的高性能模块,I3700通过三项创新克服了RTK的局限性:
基线方向:A/B 天线间距:0.8–1.5 米;使用 SETBASELINE 命令相对于载波 Y 轴进行校准
航向精度:0.2°(RTK固定解算下),远超单天线GPS(误差2°–5°)
抗遮挡能力:利用具有 2.5°/小时偏差稳定性的陀螺仪,在 GNSS 信号丢失时保持航向。
# 扩展卡尔曼滤波器 (EKF) 工作流程 while True: gnss_data = get_rtk_position() # 获取 RTK 位置 imu_data = read_mems() # 读取 MEMS 角速度/加速度 wheel_speed = can_obd2_decode() # 解码 CAN 总线车辆速度 fused_position = ekf_fusion(gnss_data, imu_data, wheel_speed)
支持的外围设备:里程表、多普勒速度记录仪 (DVL)、视觉传感器
连续导航:水平定位误差
| 范围 | 规格 | 行业优势 |
|---|---|---|
| 防护等级 | IP68防水 | 农场/航海泥泞环境 |
| 温度范围 | -40°C 至 85°C | 极端寒冷/炎热条件 |
| 电源 | 6–36V 宽电压直流 | 车辆直接功率消耗 |
| 认证 | CE/ROHS | 出口合规性 |
挑战:农田中的信号遮挡会导致自动化作业过程中路径偏离
I3700解决方案:
双天线提供稳定的航向,RTK导航可实现±2.5厘米的行间精度。
INS 维护 <树遮挡下,10 秒内误差为 1 米
命令:CONFIG MODEL CAR 激活车辆运动约束
关键配置:通过 LOG INSPVAXB ONTIME 0.05 输出 20Hz 融合导航数据
精确悬停:RTK固定解算下位置精度为0.8cm+1ppm
抗风姿态:150Hz加速度计补偿侧风干扰
数据传输:RS-422接口传输二进制RAWIMUXB(原始IMU数据)数据流
I3700 的多协议接口可实现无限的系统集成:
云协作:通过 4G DTU 接入千讯/中国移动 CORS
CONFIG NTRIP rtk.ntrip.qxwz.com 8002 AUTO qxx 123456 # 千讯账号设置
汽车级通信:SAE J1939 输出 PGN65341(姿态)/PGN65345(航向)
同步触发:PPS脉冲+SYNC_IN引脚同步激光雷达扫描
RTK技术解决了绝对定位精度问题,而像I3700这样的GNSS/INS系统则提供了环境鲁棒性和姿态维度信息。它们共同构成了一个“时空双核”系统,弥合了自动驾驶、智慧农业和机器人技术在“最后一厘米”定位方面的差距。


 CN
CN






 网络支持
网络支持

