
产品:GNSS/INS 集成导航解决方案
主要特点:
结论:集成系统的设计正在不断发展,其解决方案在增强应对挑战性环境的稳健性的同时,兼顾了成本和复杂性。
在GNSS/INS组合导航系统中,GNSS测量数据在校正INS方面起着至关重要的作用。因此,组合系统的正常运行取决于卫星信号的连续性和稳定性。然而,当系统在立交桥、树冠或城市建筑物内运行时,卫星信号很容易受到遮挡或干扰,从而可能导致GNSS接收机失去锁定。本文探讨了在卫星信号丢失的情况下,如何维持GNSS/INS组合导航系统的精度和稳定性。
当卫星信号长时间不可用时,GNSS 校正的缺失会导致 INS 误差迅速累积,尤其是在低精度惯性测量单元的系统中。这个问题会降低集成系统的精度、稳定性和连续性。因此,必须解决这一问题,以提高集成系统在复杂环境下的鲁棒性。
目前,针对卫星信号丢失的情况,主要有两种解决方案。
一方面,可以将额外的传感器集成到现有的GNSS/INS系统中,例如里程计、激光雷达、天文传感器和视觉传感器。这样,当卫星信号丢失导致GNSS不可用时,新添加的传感器可以提供测量信息,并与INS形成一个新的集成系统,从而抑制INS误差的累积。这种方法的缺点包括:由于增加了传感器,系统成本会增加;如果新传感器需要复杂的滤波模型,则设计难度也会增加。
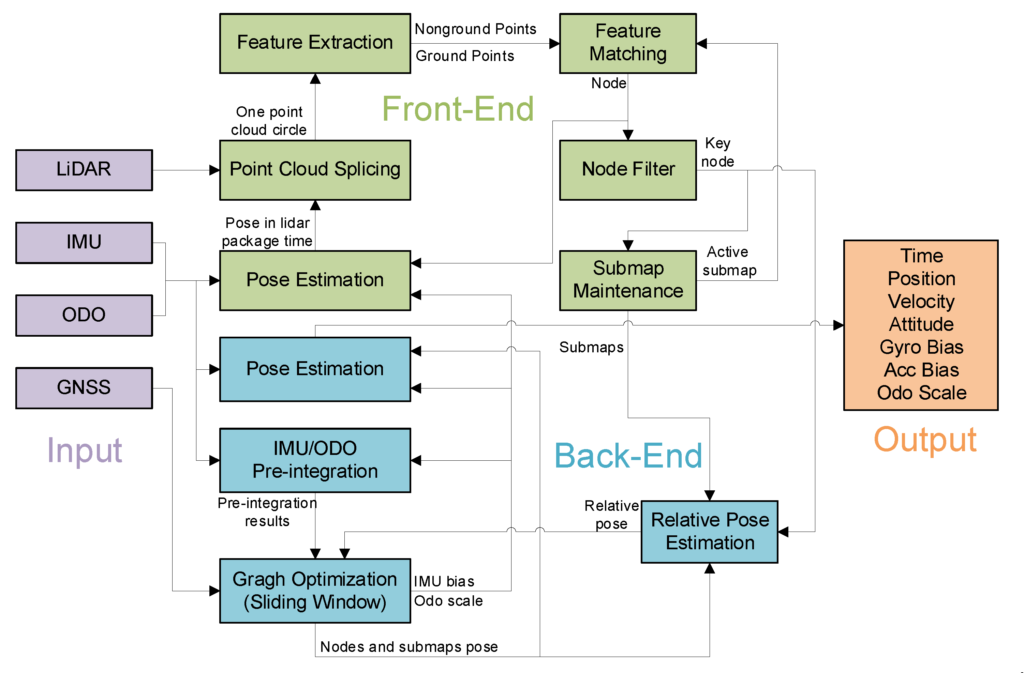
图 1 GNSS IMU ODO LiDAR SLAM 集成导航系统的系统概览。
另一方面,可以基于车辆的运动特性建立具有运动状态约束的定位模型。该方法无需在现有集成系统中添加新的传感器,从而避免了额外的成本。当GNSS信号不可用时,运动状态约束可提供新的测量信息,以抑制INS的偏差。例如,当车辆静止时,可以应用零速更新(ZUPT)技术来抑制INS误差的累积。
ZUPT 是一种低成本且常用的抑制惯性导航系统 (INS) 发散的方法。理论上,当车辆静止时,其速度应为零。然而,由于 INS 误差会随时间累积,输出速度并不为零,因此 INS 输出速度可以作为速度误差的度量。由此,基于车辆速度为零的约束条件,可以建立相应的测量方程,为集成系统提供测量信息,并抑制 INS 误差的累积。
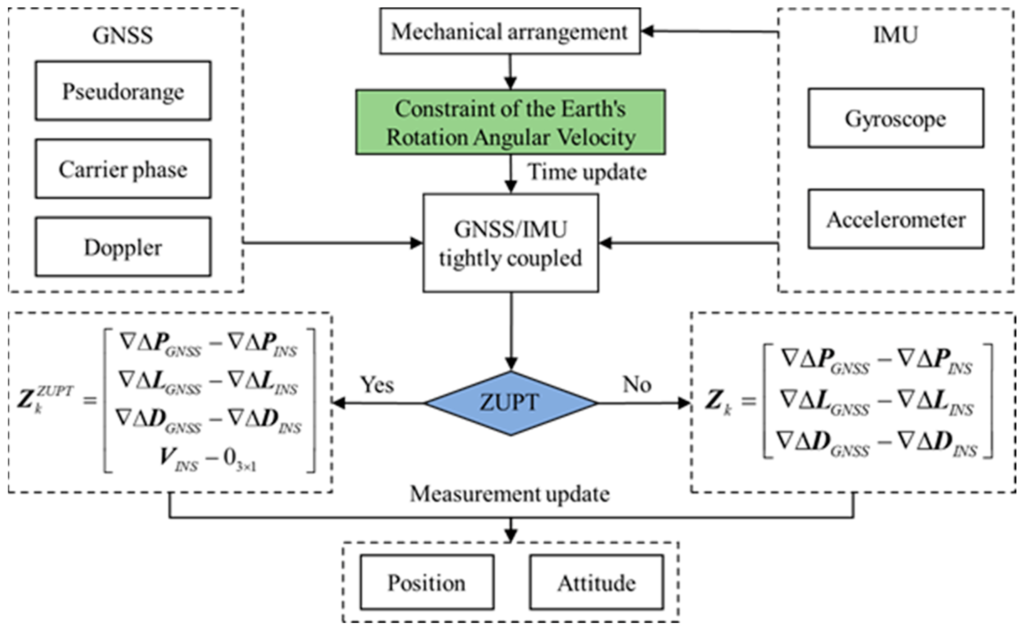
图 2 基于 ZUPT 的 GNSSIMU 与 CERAV 紧密耦合算法的流程图。
然而,零速度更新技术(ZUPT)的应用要求车辆保持静止,因此它是一种静态零速度更新技术,无法在车辆正常行驶过程中提供测量信息。在实际应用中,这意味着车辆需要频繁地从行驶状态停止,从而降低了其机动性。此外,ZUPT 还要求精确检测车辆的静止时刻。如果检测失败,则可能提供错误的测量信息,这不仅可能导致该方法失效,甚至还会导致集成系统的精度下降或出现偏差。
卫星信号丢失会导致惯性导航系统(INS)误差快速累积,尤其是在城市等复杂环境中。目前提出了两种主要解决方案:一是增加额外的传感器,例如激光雷达(LiDAR)或视觉传感器,以提供替代测量数据;二是利用运动状态约束(例如零速更新(ZUPT)技术)来校正INS误差。每种方法各有优缺点:传感器集成会增加成本和复杂性,而ZUPT则要求车辆保持静止状态并被精确检测才能有效。
Micro-Magic 公司处于惯性导航技术的前沿,近期推出了三款不同精度级别的 GNSS 辅助 MEMS 惯性导航系统 (INS) 产品(工业级、战术级和导航级)。值得注意的是,工业级 MEMS GNSS/INS I3500 具有 2.5°/小时的偏差不稳定性以及 0.028°/√小时的角度随机游走,并配备了量程宽广(±6g,零偏差不稳定性)的高精度 MEMS 加速度计。 <30微克)。


 CN
CN









 网络支持
网络支持

