请选择您的语言 :
社交分享 :
CN
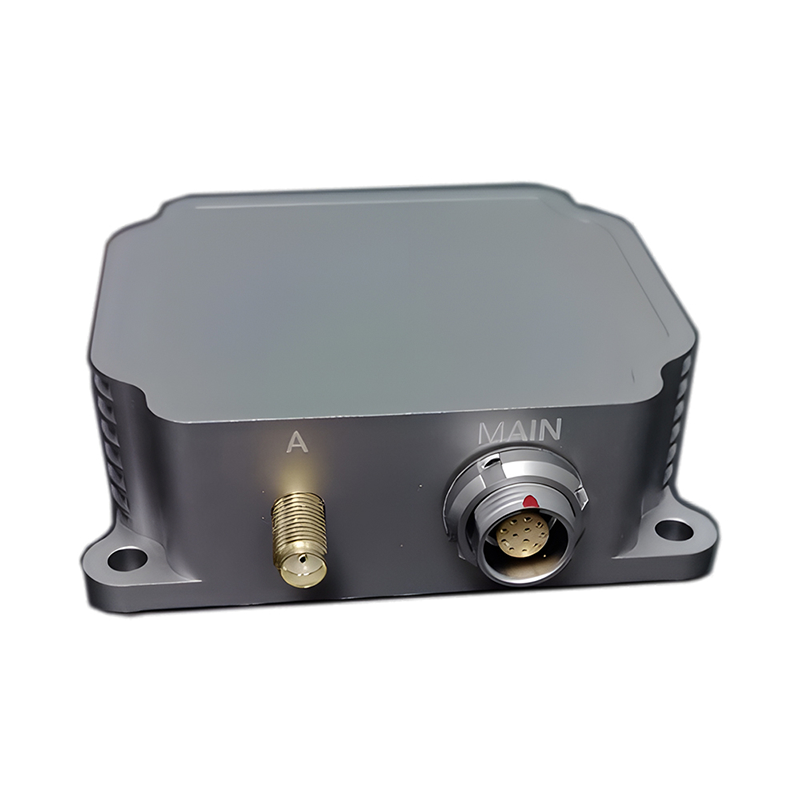
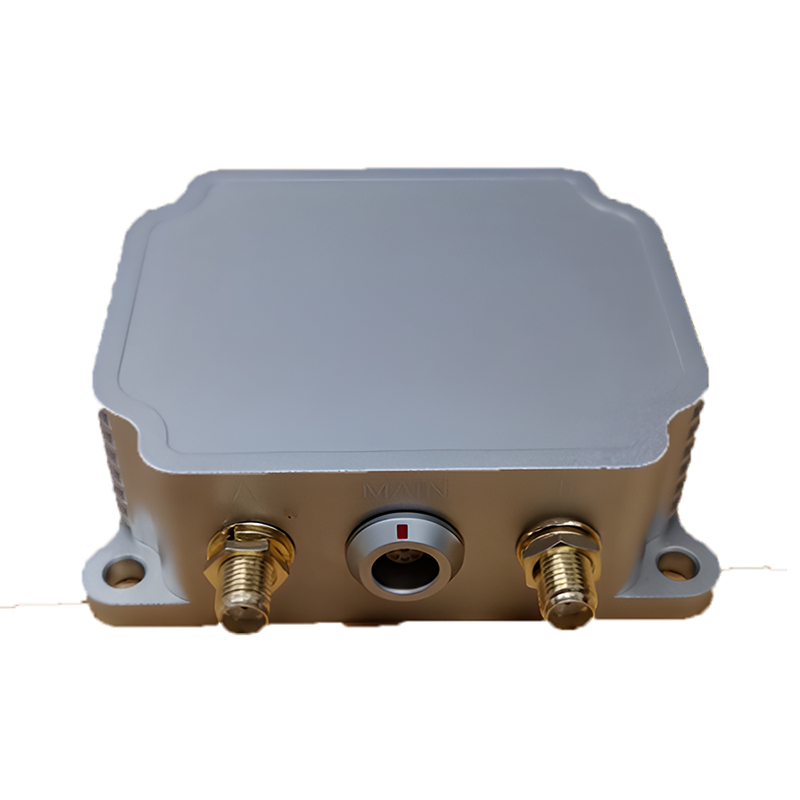
MEMS+GNSS单天线导航传感器,RS232/RS422输出,支持RTK/NTRIP
I3500 是 集成导航系统 (GNSS/INS)由高性能MEMS传感器、高精度GNSS系统和高性能微处理器组成。内置自主研发的高可靠性集成导航算法,可实时输出被测载体的速度、位置、姿态等信息。用户还可以外接RTCM差分校正数据,实现高精度RTK定位。IP68防水外壳设计,便于集成到用户系统中。产品型号信息如下:
零件编号 :
订单(最小起订量) :
产品系列及参数
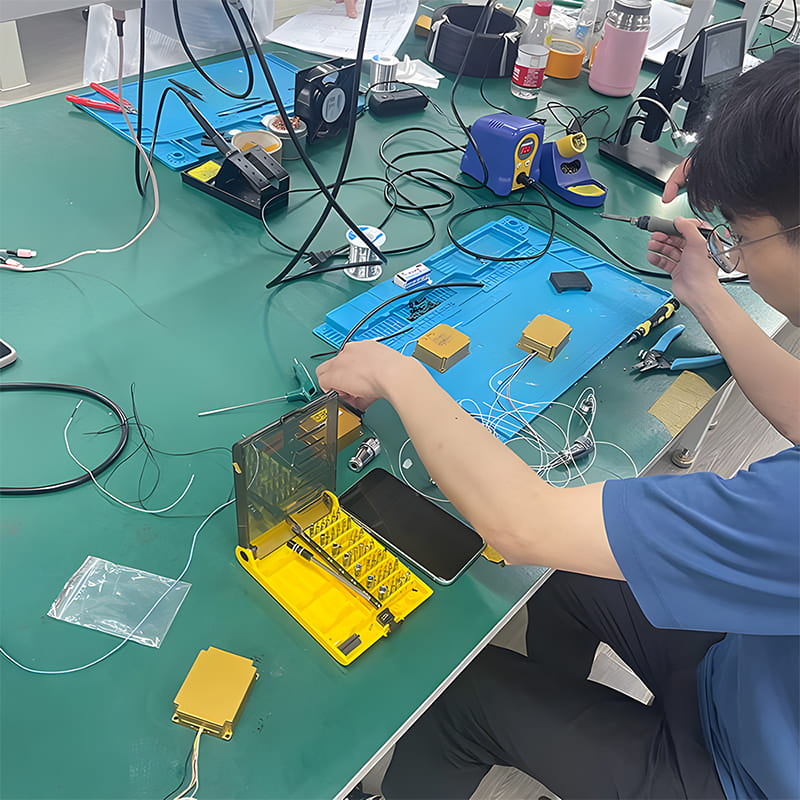
生产过程
产品尺寸
应用场景
常问问题
Xml 隐私政策 博客 网站地图
网络支持
留言
扫码到微信 :
家
产品
WhatsApp
联系我们














 CN
CN














 网络支持
网络支持

