

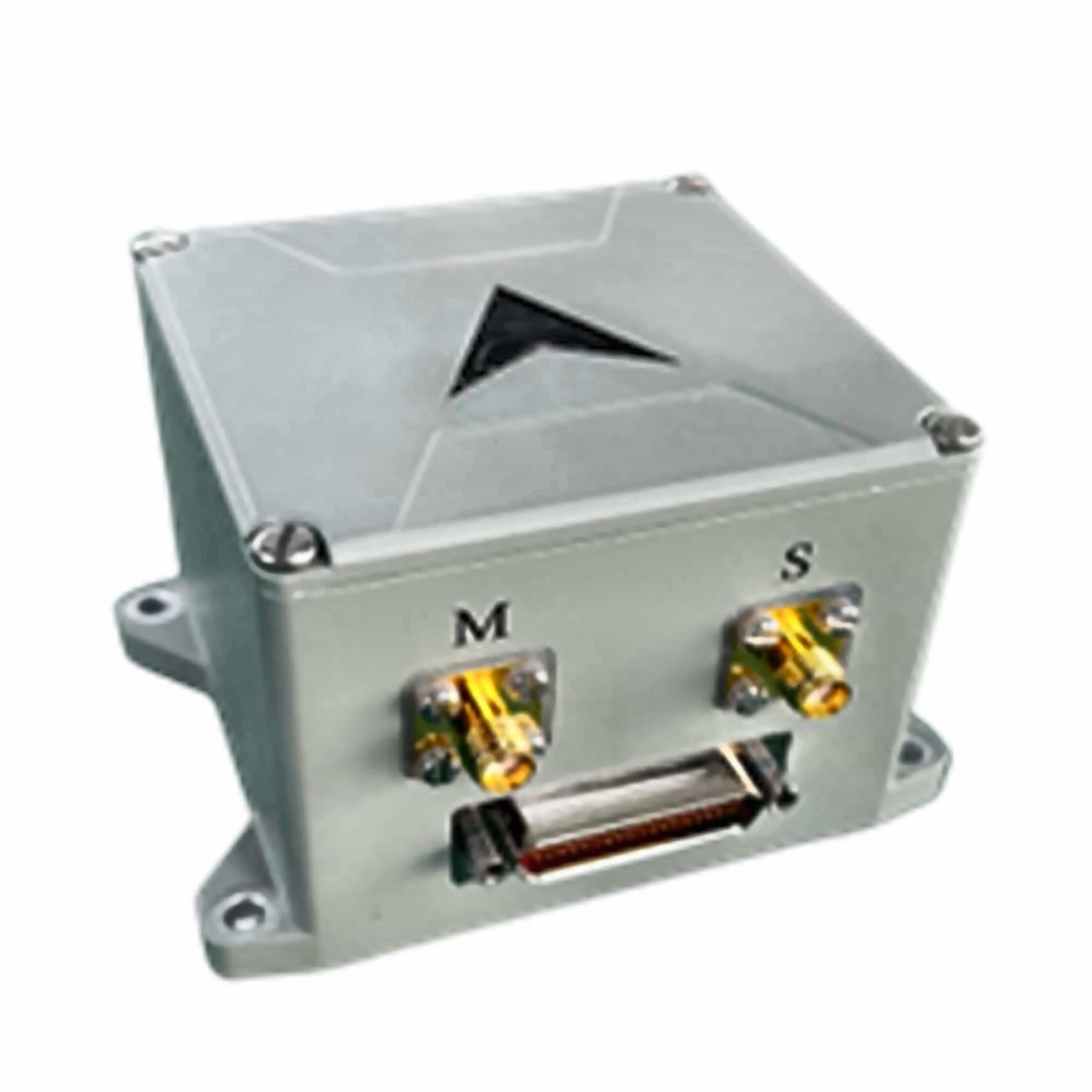

I6700系列MEMS集成导航系统是一款高精度、高可靠性且经济高效的导航系统。 MEMS惯性集成导航系统可广泛应用于车辆、船舶和无人机所代表的导航、控制和测量领域。
I6700系列集成导航系统集成了高性能MEMS陀螺仪、MEMS加速度计和GNSS卫星接收机芯片。通过感知地球自转角速率和加速度,该系统利用静态自对准技术获得当前载体运动的真实航向,并与从卫星GNSS接收机获取的三维速度、位置和航向信息进行集成导航。该集成导航系统对内部IMU模块进行零点偏差温度漂移补偿和全温标补偿,以确保产品可靠性。
该产品提供多种配置模式,以适应不同的载体,例如空中、车辆和舰载。合适的场景模式有助于确保载体姿态的长期测量精度。
零件编号 :
I6700订单(最小起订量) :
1产品系列及参数
| 范围 | 技术指标 | ||
| I6700-A | I6700-B | I6700-C | |
| 陀螺仪 | |||
| 范围(°/s) | ±200 | ±400 | ±300 |
| 全温零偏差(°/h,3σ) | ≤0.3 | ≤2 | ≤80 |
| 零偏稳定性(°/h,10s) | ≤0.1 | ≤0.5 | ≤3 |
| 零偏不稳定性(°/h,allan,typ) | ≤0.02 | ≤0.05 | ≤0.5 |
| 零偏差重复性(°/h) | ≤0.1 | ≤0.3 | ≤3 |
| 角度随机游走(°/√h) | ≤0.01 | ≤0.02 | ≤0.025 |
| 尺度因子非线性(ppm) | ≤100 | ≤100 | ≤100 |
| 轴向交叉耦合(弧度) | ≤0.001 | ≤0.001 | ≤0.001 |
| 带宽(Hz) | ≥50 | ≥200 | ≥200 |
| 加速度计 | |||
| 范围(克) | ±10 | ±30 | ±20 |
| 全温零偏压(mg,3σ) | ≤0.5 | ≤2 | ≤2 |
| 零偏压稳定性(μg,10s) | ≤20 | ≤50 | ≤50 |
| 零偏差不稳定性(μg,allan,typ) | ≤10 | ≤30 | ≤30 |
| 零偏重复性(ug) | ≤20 | ≤50 | ≤60 |
| 速度随机游走(米/秒/√h) | ≤0.02 | ≤0.03 | ≤0.04 |
| 尺度因子非线性(ppm,±1g) | ≤100 | ≤100 | ≤100 |
| 轴向交叉耦合(弧度) | ≤0.001 | ≤0.001 | ≤0.001 |
| 带宽(Hz) | ≥50 | ≥200Hz | ≥200 |
| 导航精度 | |||
| 寻北精度(°,1σ) | ≤0.5 | ≤3 | / |
| 失锁后的纯惯性精度(1σ,60s,忽略初始误差) | ≤3米/60秒 | ≤5米/60秒 | ≤10米/60秒 |
| 升沉测量精度 | ≤5厘米 | ≤5厘米 | ≤5厘米 |
| 组合水平位置(米,1σ) | ≤2(单点) | ≤2(单点) | ≤2(单点) |
| ≤0.02+1ppm(RTK) | ≤0.02+1ppm(RTK) | ≤0.02+1ppm(RTK) | |
| 综合天顶位置(米,1σ) | ≤3(单点), | ≤3(单点), | ≤3(单点), |
| ≤0.03+1ppm(RTK) | ≤0.03+1ppm(RTK) | ≤0.03+1ppm(RTK) | |
| 综合水平速度(米/秒,1σ) | ≤0.05 | ≤0.05 | ≤0.05 |
| 综合向上速度(米/秒,1σ) | ≤0.1 | ≤0.1 | ≤0.1 |
| 组合航向(°,1σ,实时) | ≤0.1(2米基线双天线) | ≤0.1(2米基线双天线) | ≤0.1(2米基线双天线) |
| ≤0.15(单点,动态) | ≤0.15(单点,动态) | ≤0.2(单点,动态) | |
| ≤0.05(RTK,动态) | ≤0.05(RTK,动态) | ≤0.1(RTK,动态) | |
| ≤0.03(后处理) | ≤0.03(后处理) | ≤0.05(后处理) | |
| 组合水平姿态(°,1σ,实时) | ≤0.015(单点,动态) | ≤0.015(单点,动态) | ≤0.05(单点,动态) |
| ≤0.01(RTK,动态) | ≤0.01(RTK,动态) | ≤0.03(RTK,动态) | |
| ≤0.007(后处理) | ≤0.007(后处理) | ≤0.01(后处理) | |
| 物理特性 | |||
| 电源(V) | 9~36 | ||
| 稳态功率(瓦) | ≤4 | ||
| 启动时间(秒) | ≤2 | ||
| 数据速率(Hz,最大值) | 200 | ||
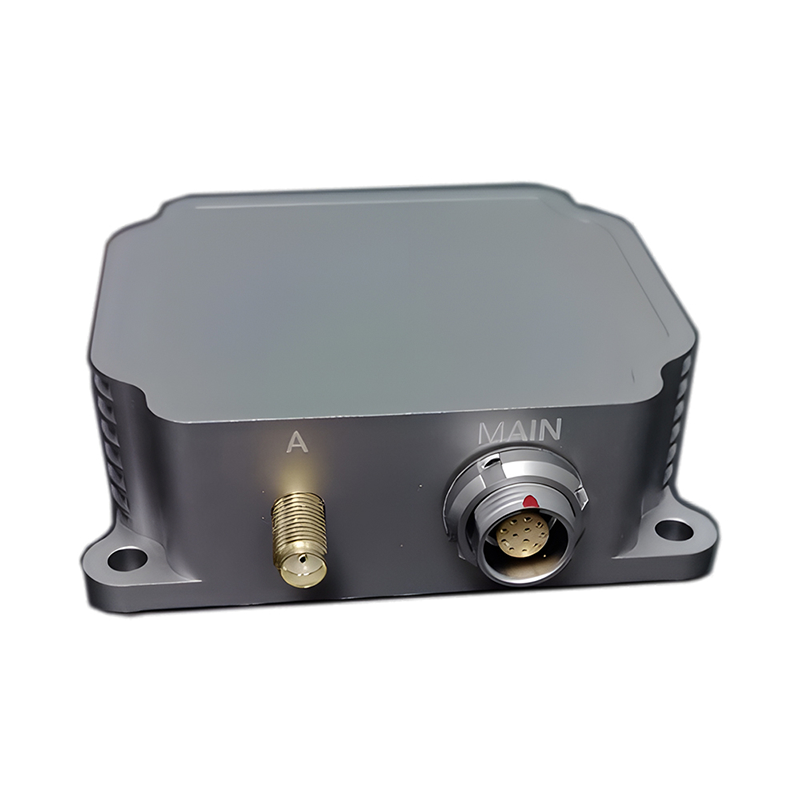
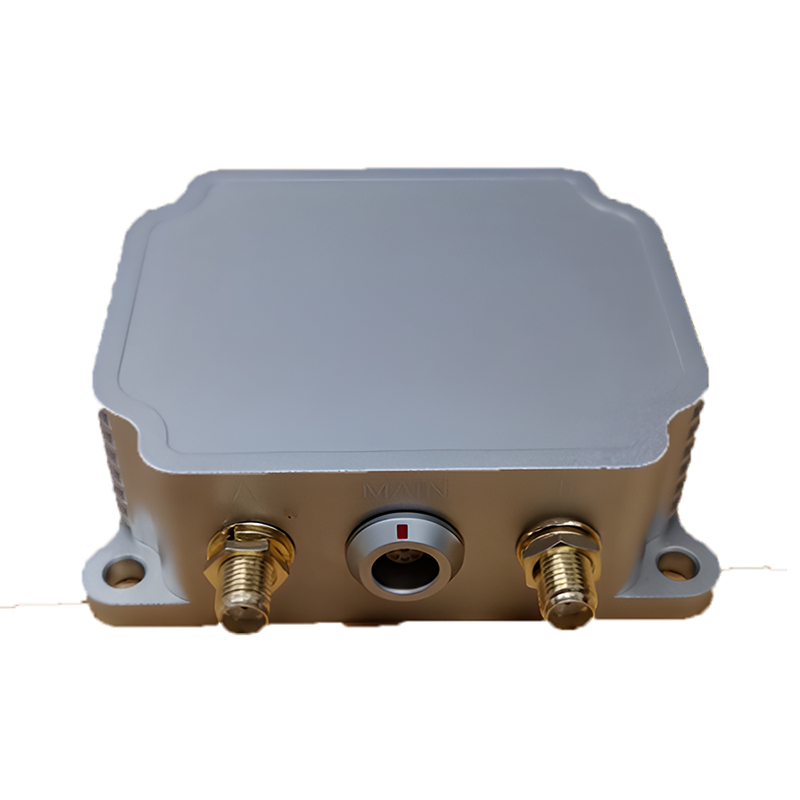
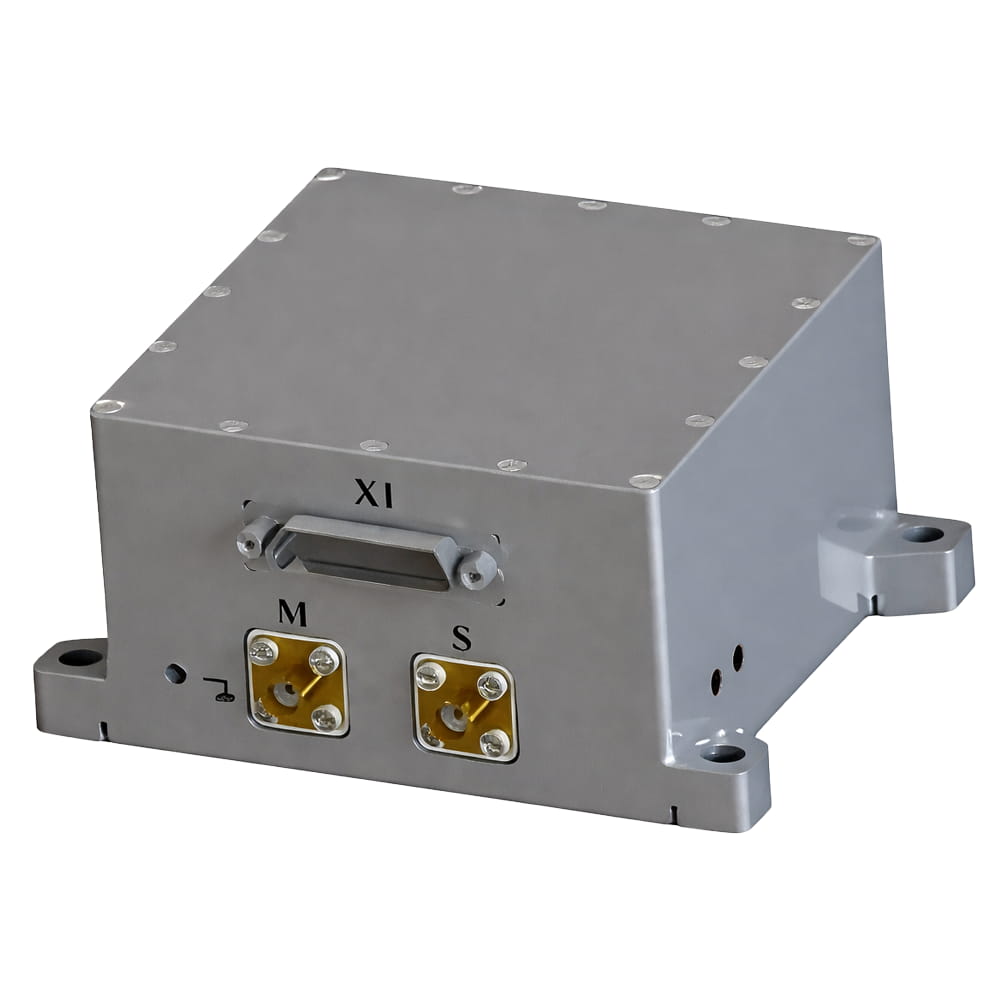
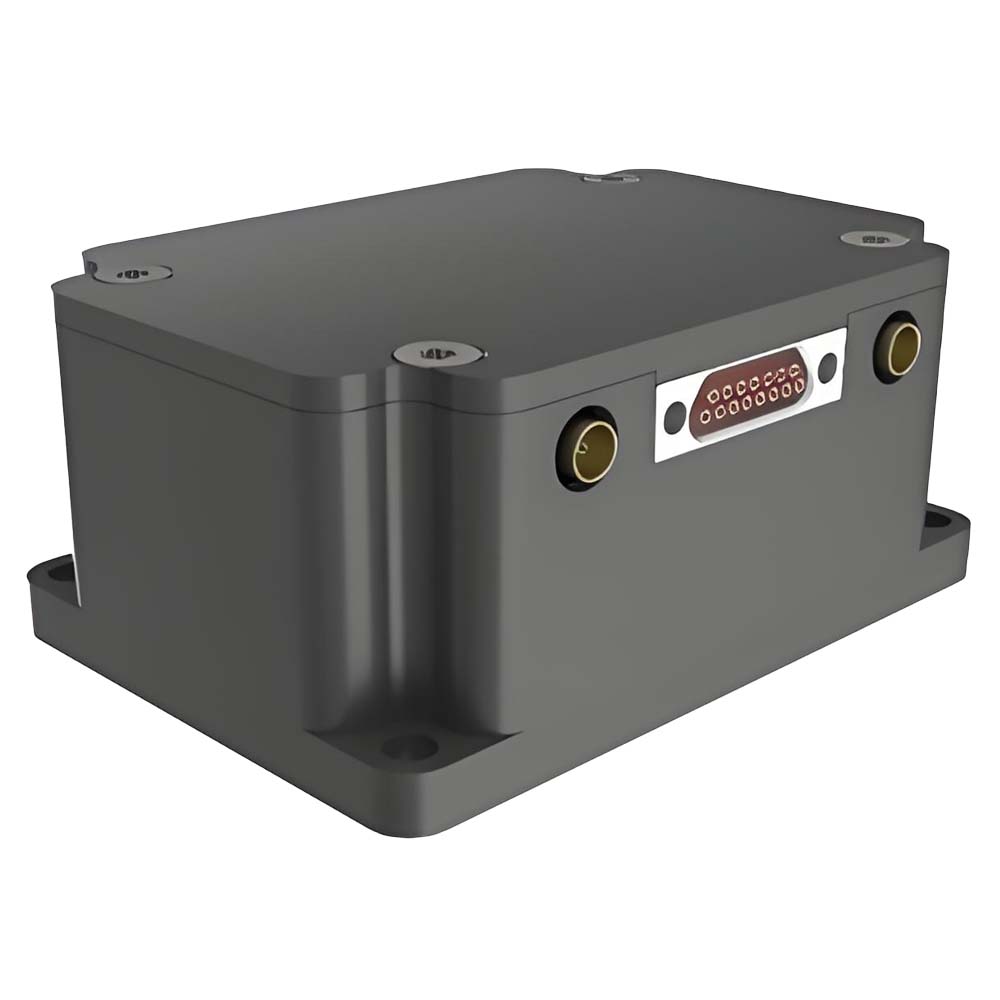
| 尺寸(毫米×毫米×毫米) | 87×72×56 | ||
| 重量(克) | 370±20 | ||
| 运行环境 | |||
| 工作温度(℃) | -40~+80 | ||
| 储存温度(℃) | -55~+85 | ||
| 振动(g,RMS) | 20~2000赫兹,6.06 | ||
| 冲击(g) | 500克/1毫秒 | ||
生产过程
产品尺寸


应用场景



常问问题






 CN
CN














 网络支持
网络支持

