


I6000是林斯科技自主研发的模块级MEMS集成导航系统。它集成了MEMS惯性测量单元(IMU)和高精度双天线GNSS。利用多源卡尔曼滤波融合算法,即使在复杂环境下也能提供连续可靠的高精度定位导航信息。该产品广泛应用于卫星通信、无人机、测绘、智能驾驶等领域。
产品特性
⚪ 支持北斗、GPS、GLONASS、伽利略和准天顶卫星系统全系统多频点,并支持北斗三号卫星系统
⚪ IMU已在工厂完成校准
⚪ 自适应静态/动态对齐
⚪ 可配置的通用车辆运动信息(例如 ODM)接口
⚪ 自适应补偿系统安装误差和 ODM 比例误差
⚪ GNSS 信号中断时,水平定位精度可达 0.2%×D 以内①
⚪ 最高可选配 32GB 内部存储空间
应用
⚪ 自动驾驶
⚪ 平台稳定性和控制
⚪ 自动化机械
⚪ 机器人控制
零件编号 :
I6000订单(最小起订量) :
1产品系列及参数
| 参数 | 典型的 | 描述 | |
| 开始时间 | GNSS冷启动 | <25秒 | |
| GNSS RTK初始化时间 | <5秒 | ||
| 集成导航的对准时间 | <60秒 | 双天线在开阔天空下工作,包括冷启动。 | |
| 卫星信号跟踪 | 频率点 | 北斗B1I/B2I | |
| GPS L1/L2 | |||
| GLONASS L1/L2 | |||
| 伽利略E1/E5b | |||
| 航向精度 | 全球导航卫星系统有效 | 0.1° | 双天线,基线长2米;单天线需要动态对准 |
| 保持准确性 | 0.15°C/分钟 | GNSS故障 | |
| 姿态精度 | 全球导航卫星系统有效 | 0.1° | RTK/单点双频 |
| 保持准确性 | 0.1° | GNSS 中断 5 分钟 | |
| 水平定位精度 | 全球导航卫星系统有效 | 1.2米 | 单点双频 |
| 1厘米 + 1ppm | RTK | ||
| 保持准确性 | 0.1% × D | 带里程表,时速 60 公里/小时,120 秒内 | |
| 水平速度精度 | 全球导航卫星系统有效 | 0.03 米/秒 | |
| 时间服务准确性 | 全球导航卫星系统有效 | 20纳秒 | |
| 陀螺仪 | 范围 | ±400°/秒 | |
| 偏差不稳定性 | 0.5°C/小时 | 艾伦方差 | |
| 尺度因子非线性 | 100ppm | ||
| 加速度计 | 范围 | ±20克 | |
| 偏差不稳定性 | 20微克 | 艾伦方差 | |
| 尺度因子非线性 | 100ppm | ±1克 | |
| 输出频率 | GNSS结果 | 10 赫兹 | 位置/速度/航向/原始数据信息 |
| IMU原始数据 | 200赫兹 | ||
| INS结果 | 200赫兹 | ||
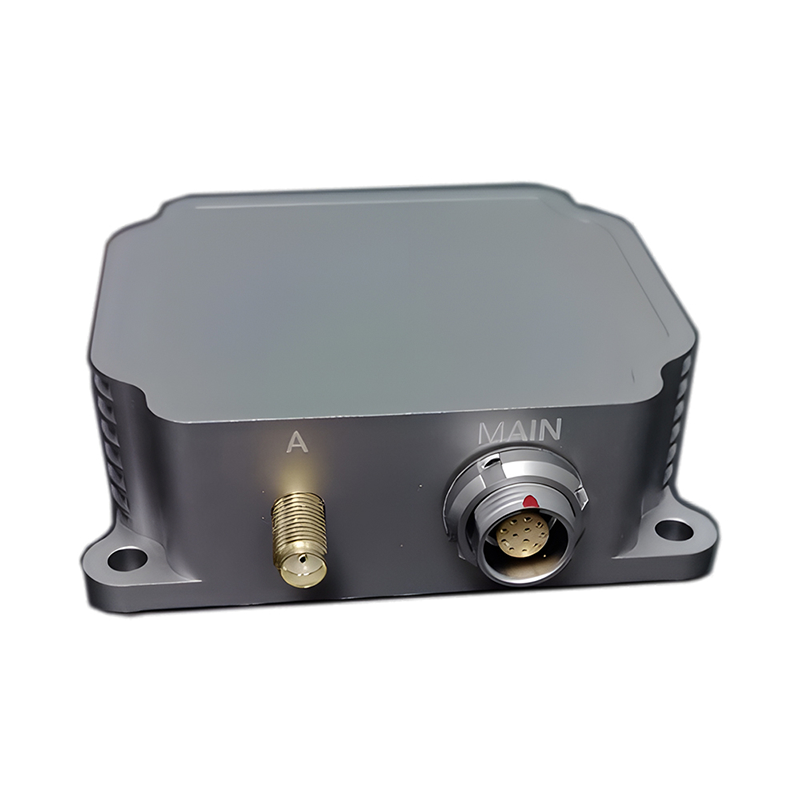
| 通信接口 | RS-232 | 4 香奈儿 | 2个用于惯性导航系统(INS),2个用于全球导航卫星系统(GNSS)。 |
| 个人电源 | 1 香奈儿 | ||
| 事件 | 1 香奈儿 | ||
| 能 | 2 香奈儿 | 数据协议是定制的 | |
| 100M以太网 | 1 香奈儿 | ||
| 电气特性 | 电压 | 9~36伏直流电 | |
| 功耗 | ≤ 6 瓦 | ||
| 机械特性 | 尺寸 | 98 × 94 × 31 毫米 | 不包括连接器的尺寸 |
| < 98 × 102 × 31 毫米 | 包括连接器的尺寸 | ||
| 重量 | ≤ 310 克 | ||
| 环境特征 | 工作温度 | -40℃~+85℃ | |
| 储存温度 | -55℃~+95℃ | ||
| 振动 | 6.06克 20~2000赫兹 | ||
| 令人震惊 | 40克 11毫秒 | ||
| 笔记: | |||
| 不使用统计方法的指标是均方根统计量; | |||
生产过程
产品尺寸

应用场景



常问问题





 CN
CN














 网络支持
网络支持

