

产品系列及参数
| 范围 | 技术指标 |
| 陀螺仪 | |
| 范围(°/s) | ±200 |
| 全温零偏差(°/h,3σ) | ≤0.5 |
| 零偏稳定性(°/h,10s) | ≤0.1 |
| 零偏不稳定性(°/h,allan,typ) | ≤0.02 |
| 零偏差重复性(°/h) | ≤0.1 |
| 角度随机游走(°/√h) | ≤0.01 |
| 尺度因子非线性(ppm) | ≤100 |
| 轴向交叉耦合(弧度) | ≤0.001 |
| 带宽(Hz) | ≥50 |
| 加速度计 | |
| 范围(克) | ±10 |
| 全温零偏压(mg,3σ) | ≤1 |
| 零偏压稳定性(μg,10s) | ≤30 |
| 零偏差不稳定性(μg,allan,typ) | ≤10 |
| 零偏重复性(ug) | ≤30 |
| 速度随机游走(米/秒/√h) | ≤0.02 |
| 尺度因子非线性(ppm,±1g) | ≤100 |
| 轴向交叉耦合(弧度) | ≤0.001 |
| 带宽(Hz) | ≥50 |
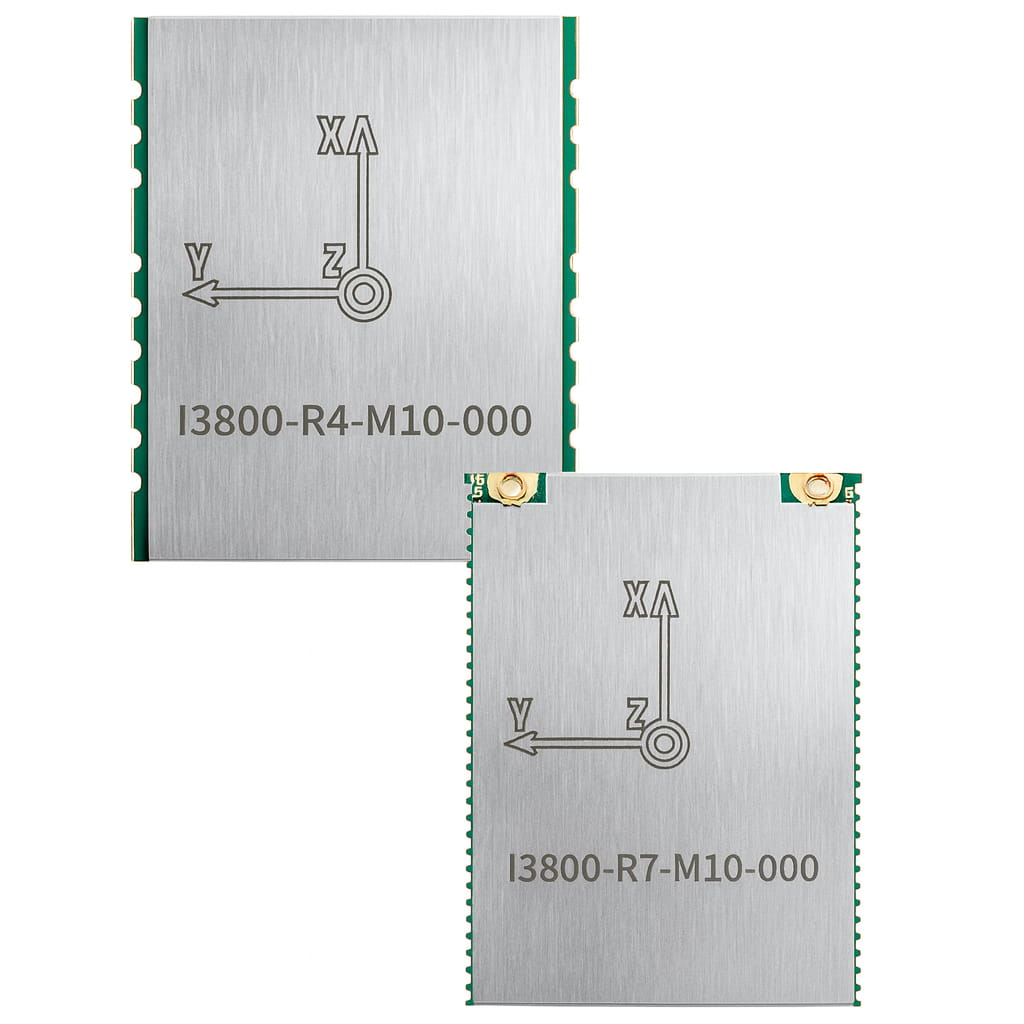
| GNSS模块 | |
| 信号 | BDS:B1I、B2I、B3I、B1C*、B2b* GPS:L1C/A、L2C、L2P(Y)、L5 GLONASS:G1、G2 伽利略:E1、E5a、E5b、E6* QZSS:L1C/A、L2C、L5、L6* SBAS:L1C/A |
| 单点定位(RMS) | 水平面1.5米,海拔2.5米 |
| RTK定位(RMS) | 平面 0.8cm+1ppm 海拔:1.5厘米 + 1ppm |
| 首次修复时间 (TTFF) | 冷启动时间小于 30 秒 |
| RTK初始化时间 | <5s |
| 方向精度(均方根值) | 0.1°/2米(基线) |
| 时间精度(均方根值) | 20ns |
| 速度精度(均方根值) | 0.05米/秒 |
| 天线特性 | |
| 频率范围 | GPS L1/L2/L5 BDS B1/B2/B3 GLONASS L1/L2/L3 伽利略E1/E5a/E5b L波段 |
| 阻抗 | 50欧姆 |
| 偏振模式 | 右旋圆偏振 |
| 天线轴比: | ≤3dB |
| 水平覆盖角度 | 360° |
| 驻波 | ≤2 |
| 相位中心误差 | ±2毫米 |
| 获得 | 36±2dB |
| 噪声系数 | ≤2dB |
| 驻波 | ≤2 |
| 工作电压 | 3.3~12VDC |
| 工作电流 | ≤45mA |
| 带外抑制(±100MHz) | ≥40dB |
| 导航精度 | |
| 自寻北向精度(°,1σ) | ≤1 |
| 组合水平位置(米,1σ) | ≤2(单点) ≤ 0.02 + 1 ppm (RTK) |
| 综合天空位置(米,1σ) | ≤3(单点), ≤0.03+1ppm (RTK) |
| 综合水平速度(米/秒,1σ) | ≤0.05 |
| 向上综合速度(米/秒,1σ) | ≤0.1 |
| 综合航向(°,1σ) | ≤0.1(2米基线双天线) ≤0.1(单点,动态) ≤0.05(RTK,动态) ≤0.03(后处理) |
| 组合水平姿态(°,1σ) | ≤0.015(单点,动态) ≤0.01(RTK,动态) ≤0.007(后处理) |
| 失锁后的纯惯性精度(1σ,60秒) | ≤1 |
| 升沉测量精度 | ≤5厘米 |
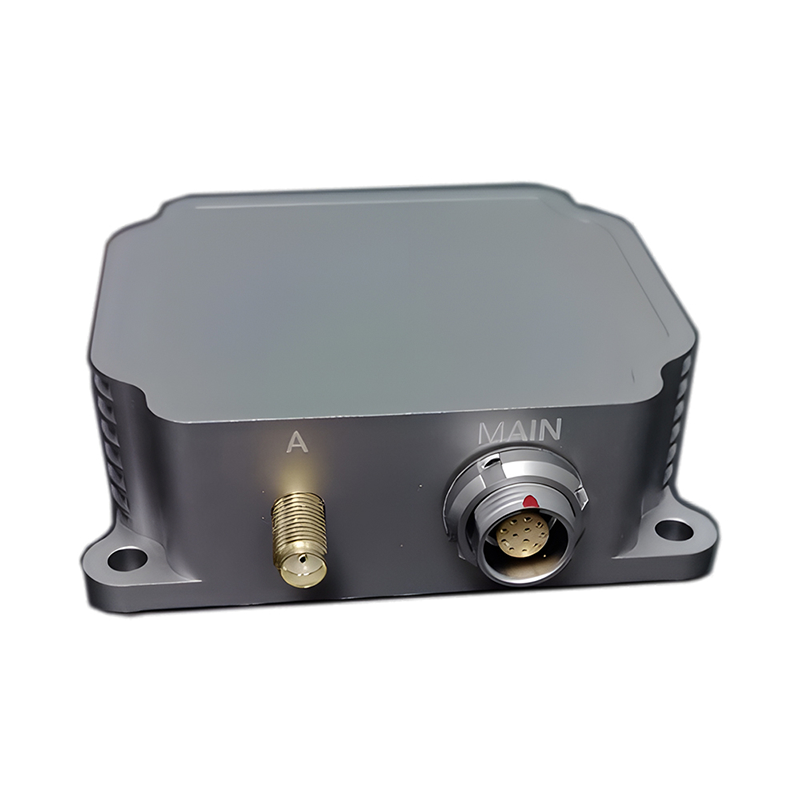
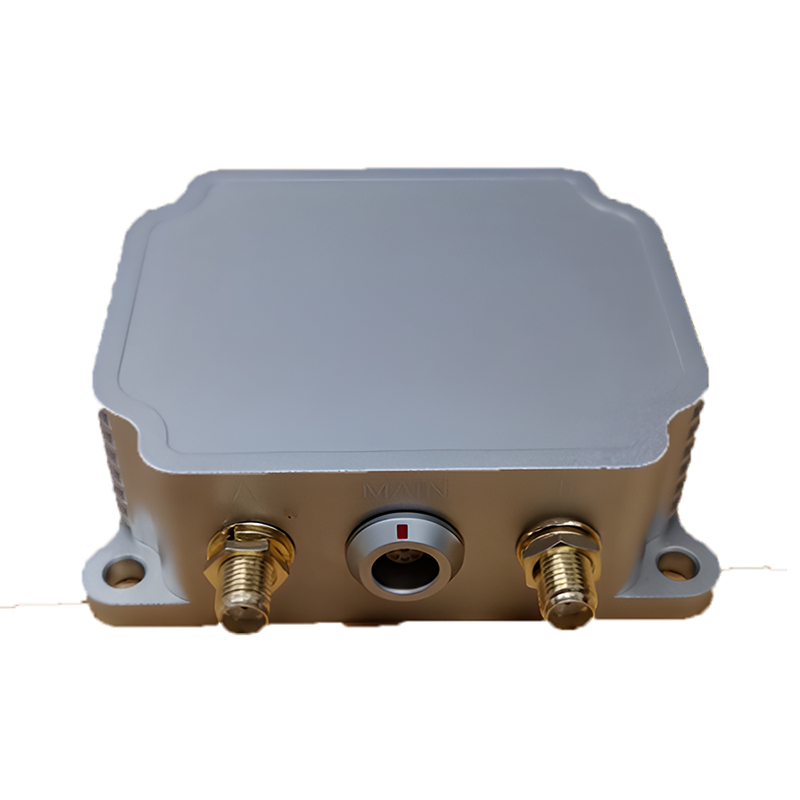
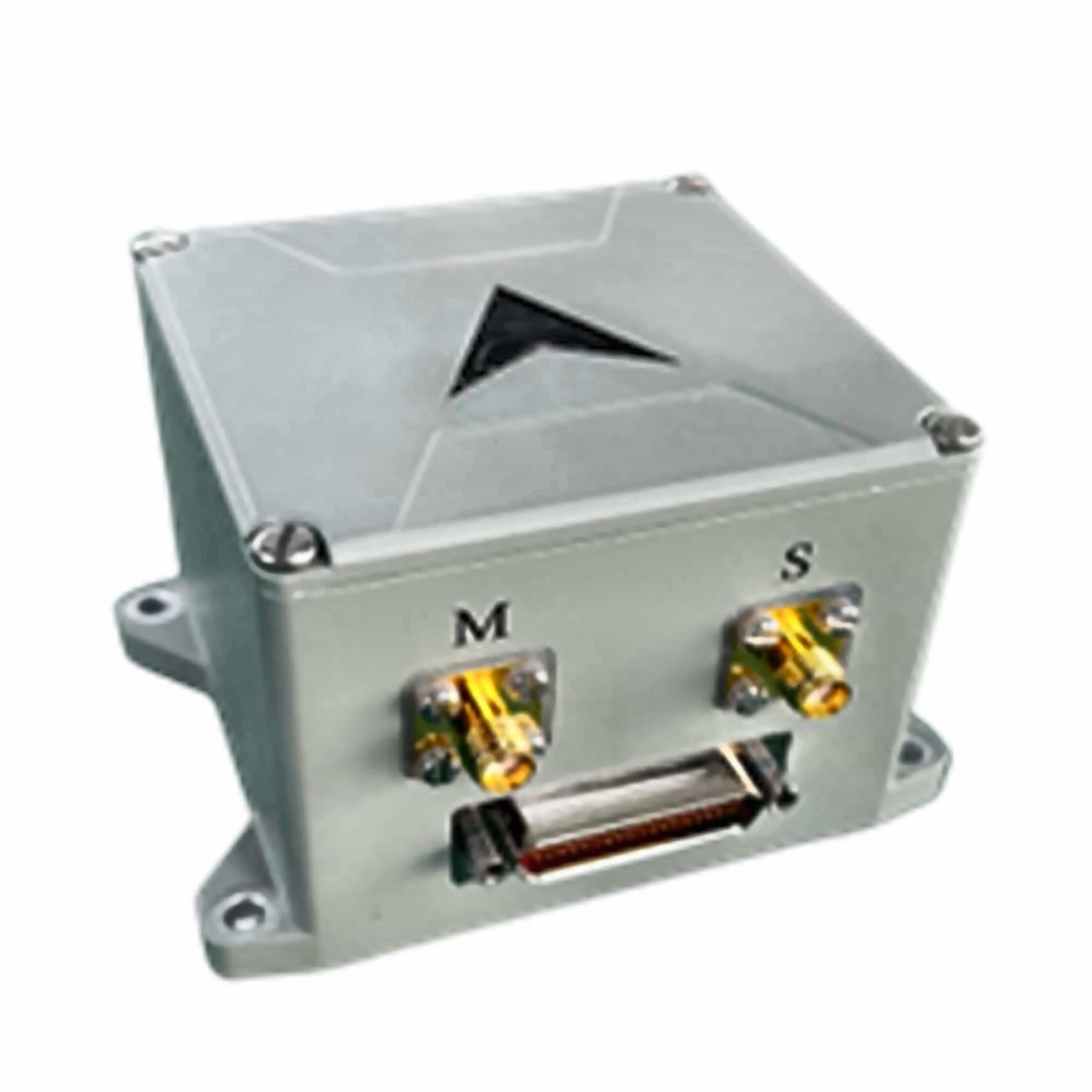
| 电气/机械接口 | |
| 电源(V) | 9~36 |
| 稳态功率(瓦) | 4 |
| 启动时间(秒) | 2 |
| 通信接口 | RS-422/RS-232/CAN/USB/以太网端口 |
| 内部存储 | 16G |
| 更新频率(赫兹) | 200(可自定义) |
| 尺寸(毫米×毫米×毫米) | 93×85×49.5 |
| 重量(克) | ≤500 |
| 运行环境 | |
| 工作温度(℃) | -40~+80 |
| 储存温度(℃) | -55~+85 |
| 振动(g,RMS) | 20~2000赫兹,6.06 |
| 冲击(g) | 1000克/1毫秒 |
| 可靠性 | |
| 平均故障间隔时间(小时) | 20000 |
生产过程
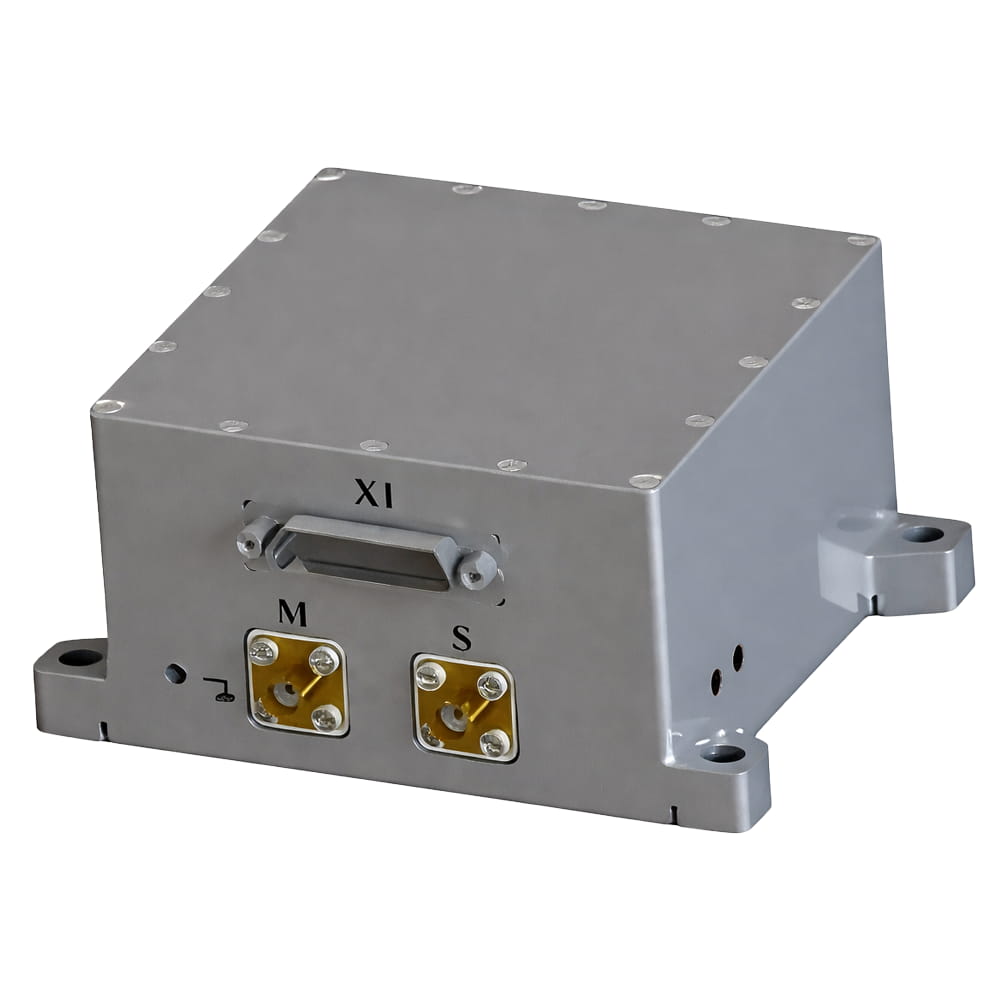
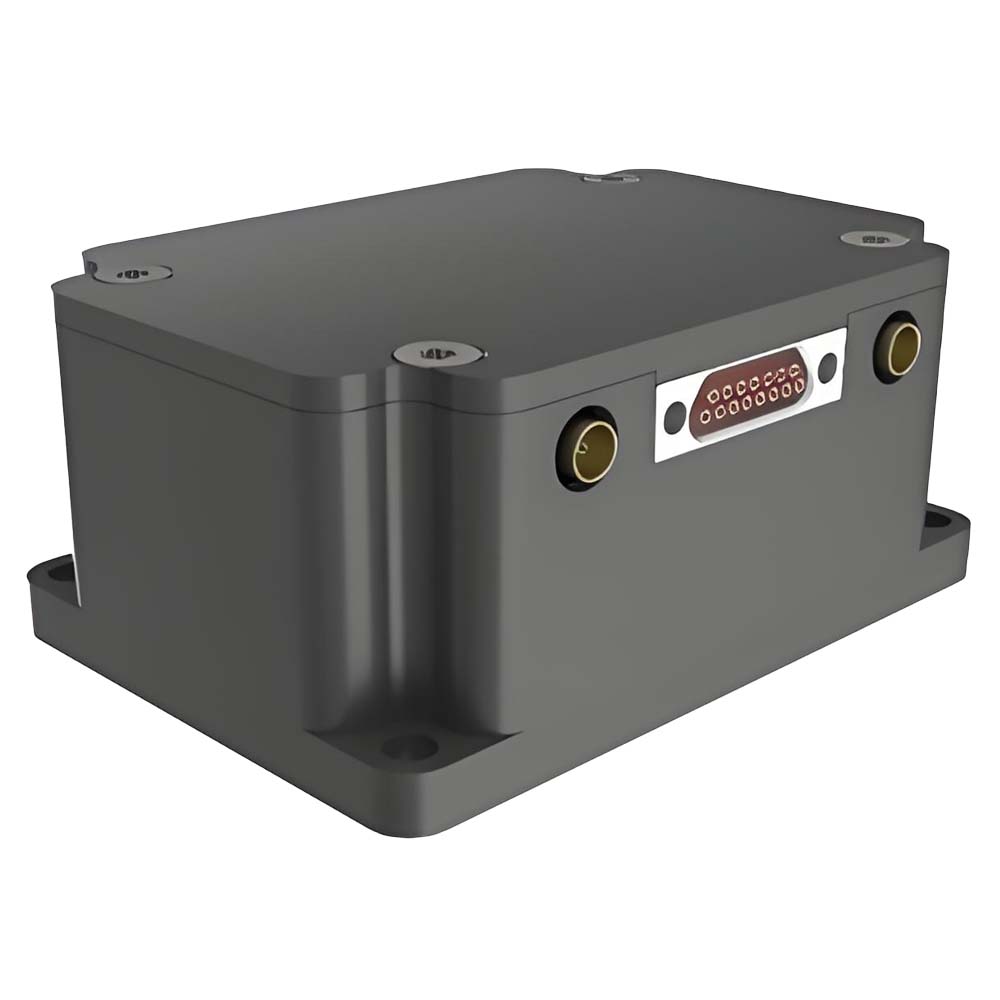
产品尺寸

应用场景



常问问题
Q1. I7200是什么?
I7200是一款高精度、高可靠性、高性价比的集成惯性/卫星导航系统。它可以集成里程计等外部信息,适用于导航、控制和测量应用。
Q2. I7200 的主要特点是什么?
I7200 具有高性能、轻量化设计、适应复杂环境、丰富的隔离措施接口、自动寻北、RTK 集成能力和运动学约束算法等特点。
Q3. I7200 适用于哪些应用?
I7200 支持实时输出 3D 导航信息和 IMU 数据,内部存储 IMU+GNSS 原始数据,在复杂环境下实现高精度 GNSS 定位和姿态控制,适用于车辆、船舶、无人机和类似平台。






 CN
CN















 网络支持
网络支持

