
一分钟快速阅读
光纤捷联惯性导航系统(FOG-SINS)利用光纤陀螺仪(FOG)和加速度计组成固态惯性测量单元(IMU),通过捷联算法实时计算载体的运动参数。凭借其显著的技术优势,FOG-SINS已成为新一代远洋船舶导航系统的核心。
光纤惯性导航系统(FOG-SINS)在海洋船舶领域的应用主要体现在船舶导航、水下航行器控制和多波束测量等方面。其核心优势在于精度高、可靠性高、抗干扰能力强、可自主导航、动态性能优异以及环境适应性好。
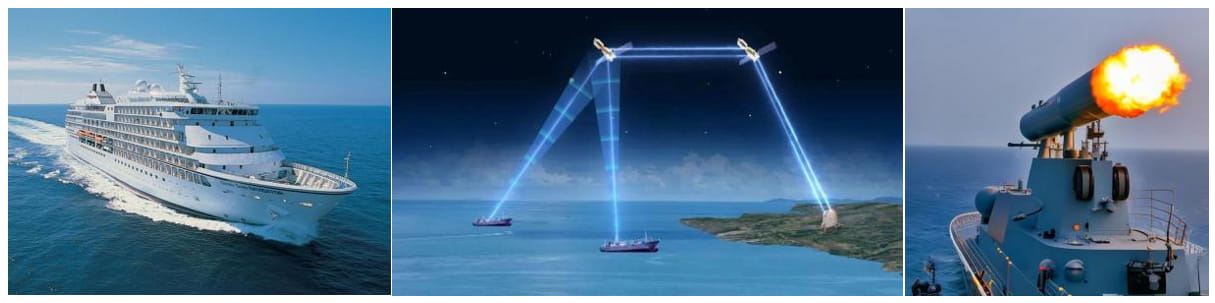
船舶导航
FOG-SINS 可以为导航提供连续自主的船舶位置、航向、姿态(横滚、纵摇)、速度和加速度信息。
FOG-SINS 集成了 GNSS(GPS、北斗等)、里程计(多普勒/电磁)、罗盘(磁罗盘/电罗盘)等(通常通过卡尔曼滤波),形成高精度、高可靠性的综合导航系统。在 GNSS 信号受到干扰、遮挡或失效的情况下(例如在峡谷、桥下、电子战环境中),FOG-SINS 能够提供关键的导航能力。
FOG-SINS还可以为舰载武器提供高精度姿态参考信息。
FOG-SINS在船舶导航中的技术优势:
⚪高精度和稳定性:现代高精度光纤陀螺仪的零偏稳定性可以达到 0.01°/h 甚至更高,角度随机游走可以达到 0.001°/√h 量级,可以满足长期、高精度惯性导航的要求,并显著降低位置误差的累积速度。
⚪ 启动迅速、响应灵敏,动态范围广:启动时间短(预热时间远短于机械陀螺仪),动态响应快,能够精确捕捉船舶的快速机动动作(例如紧急转向和避碰)。可测量船舶在极低速到高速范围内的各种运动。
⚪ 具有极强的环境适应性和抗冲击、抗振动能力:对温度、湿度、盐雾等海洋环境因素的变化相对不敏感(尤其是在经过良好的设计和补偿后),可靠性高。全固态结构(无机械旋转部件)使其能够有效抵抗船舶运行过程中固有的冲击和振动,性能稳定,使用寿命长。
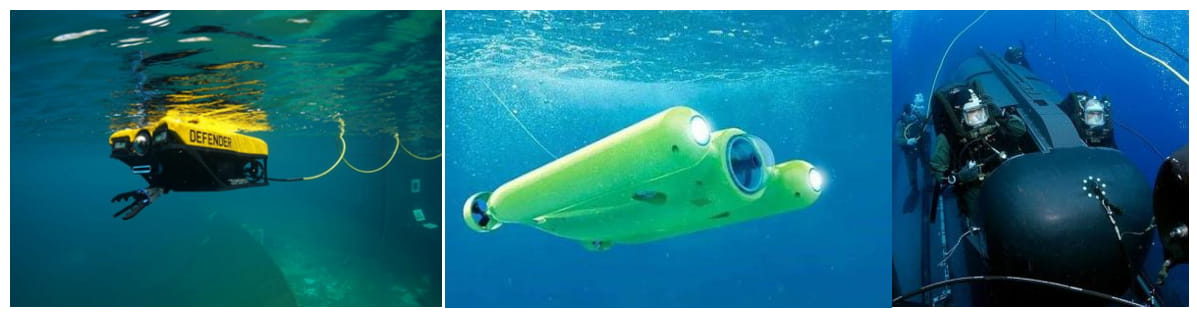
水下航行器(AUV/UUV)控制
雾惯性导航系统(FOG SINS)作为水下潜水器控制系统的核心部件,是水下自主航行器(AUV)在无GNSS信号的情况下实现长期、高精度自主导航的核心传感器。它提供位置、姿态、速度和加速度信息。
水下综合导航系统由光纤惯性导航系统(FOG SINS)、多普勒测深仪(DVL)、深度计、磁力计(航向辅助)、超短基线/长基线声学定位系统(USBL/LBL)、重力/地磁匹配导航等组成,极大地提高了导航精度和可靠性。光纤惯性导航系统是该综合导航系统的核心和基础。
FOG SINS 为 AUV 的控制系统(例如舵、推进器、姿态调整机构)提供高精度实时姿态和航向反馈,实现精确的深度、高度、方向导航以及复杂的机动操作(例如悬停和底部导航)。它为声呐(侧扫、前视)、摄像头和机械臂等任务载荷提供稳定的姿态参考,从而确保数据质量和操作精度。
水下潜水器控制系统中FOG SINS的技术优势:
⚪ 完全自主:不依赖外部信号,是实现水下真正自主导航的关键。
⚪ 高精度(尤其在水下至关重要):高精度的姿态和航向信息对于水下避障、地形跟踪和精确操作至关重要。良好的零偏稳定性可以延长水下纯惯性导航时间。
⚪ 抗磁场干扰:光纤陀螺仪基于光学原理,不受水下复杂磁场环境的影响(而磁罗盘会受到影响)。
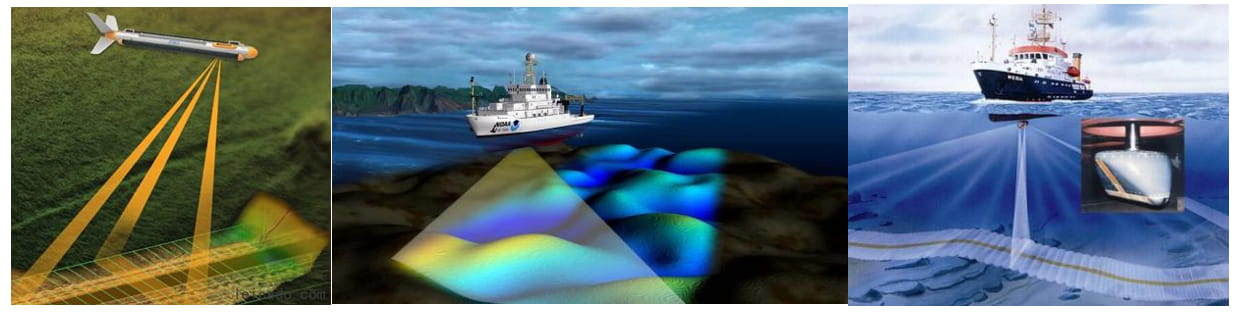
多光束测量系统
光纤惯性导航系统(FOG SINS)可为多波束测量系统提供运动补偿,这是FOG SINS在多波束深度测量中最核心的应用。它能够实时精确地测量和补偿测量船舶/平台在测量瞬间的姿态变化(横摇、纵摇、偏航)和垂荡运动。
FOG SINS 可以为多波束测量系统(通常与 GNSS 紧密耦合)提供精确的航向角和位置信息,用于确定大地坐标系中声呐阵列的精确位置和方向。
FOG SINS 可以为整个测量系统(多波束声呐、GNSS、运动传感器、声速剖面仪等)提供精确的时间参考。
FOG SINS 在多光束测量系统中的技术优势:
⚪ 超高的动态性能和带宽:能够准确、快速地测量和响应船舶/平台的高频运动(特别是短周期波浪引起的垂荡和横摇),这是获取高质量海底地形数据的关键。其动态响应能力远远超过传统的垂直参考单元(VRU)。
⚪ 高姿态精度:姿态精度(尤其是横滚和俯仰)直接影响波束角补偿精度。FOG SINS 可以提供亚角度(<0.01°)水平姿态测量精度,保证波束指向和海底足迹位置计算的精度。
⚪ 紧密集成和时间同步:FOG SINS 通常设计为高度集成的测量单元(通常称为 POS MV 或 INS),其内部传感器(陀螺仪、加速度计)具有极高的同步精度,能够与其他外部传感器(GNSS、声纳)实现微秒级的时间同步,从而确保所有数据在时间上严格对齐。
主要产品及技术规格
范围 | IF3600 | IF3700 | |
纯惯性对准精度 | 寻北精度 | ≤0.1°sec(Φ) | ≤0.05°sec(Φ) |
姿态精度 | ≤0.008° | ≤0.003° | |
纯惯性保持精度 | 航向角 | 0.03°/小时 | ≤0.01° |
姿态角 | 0.02°C/小时 | ≤0.005° | |
位置(CEP50%) | ≤1 纳米/小时 | ≤1海里/小时 | |
速度 | ≤0.5米/秒 | ≤0.5米/秒 | |
惯性/卫星组合精度 | 标题 | ≤0.02° | ≤0.02° |
态度 | ≤0.005° | ≤0.005° | |
位置 | ≤ 2米(单点) ≤ 2厘米+1ppm(RTK) | ≤1.2米(单点) ≤2厘米+1ppm(RTK) | |
速度 | ≤0.02米/秒 | ≤0.02米/秒 | |
惯性/ODO/DVL组合精度 | 里程表/DVL组合 | 0.25% ×D | ≤0.5%×D |
结论
光纤捷联惯性导航系统具有全固态高可靠性、动态精度和多传感器融合能力等优点,已成为现代船舶高精度导航、水下航行器自主运行和高分辨率海底地形测绘中不可或缺的核心技术。


 CN
CN















 网络支持
网络支持

