
应用程序

车轮速度传感器在惯性导航系统(INS)中的应用主要体现在多传感器融合和误差校正方面,尤其在车辆导航中发挥着重要作用。惯性导航系统(INS)主要依靠陀螺仪和加速度计通过积分计算位置、速度和姿态,但存在误差累积的问题。作为一种低成本、高频率的增量式传感器,车轮速度传感器可以有效缓解惯性导航中的误差发散问题。目...
阅读更多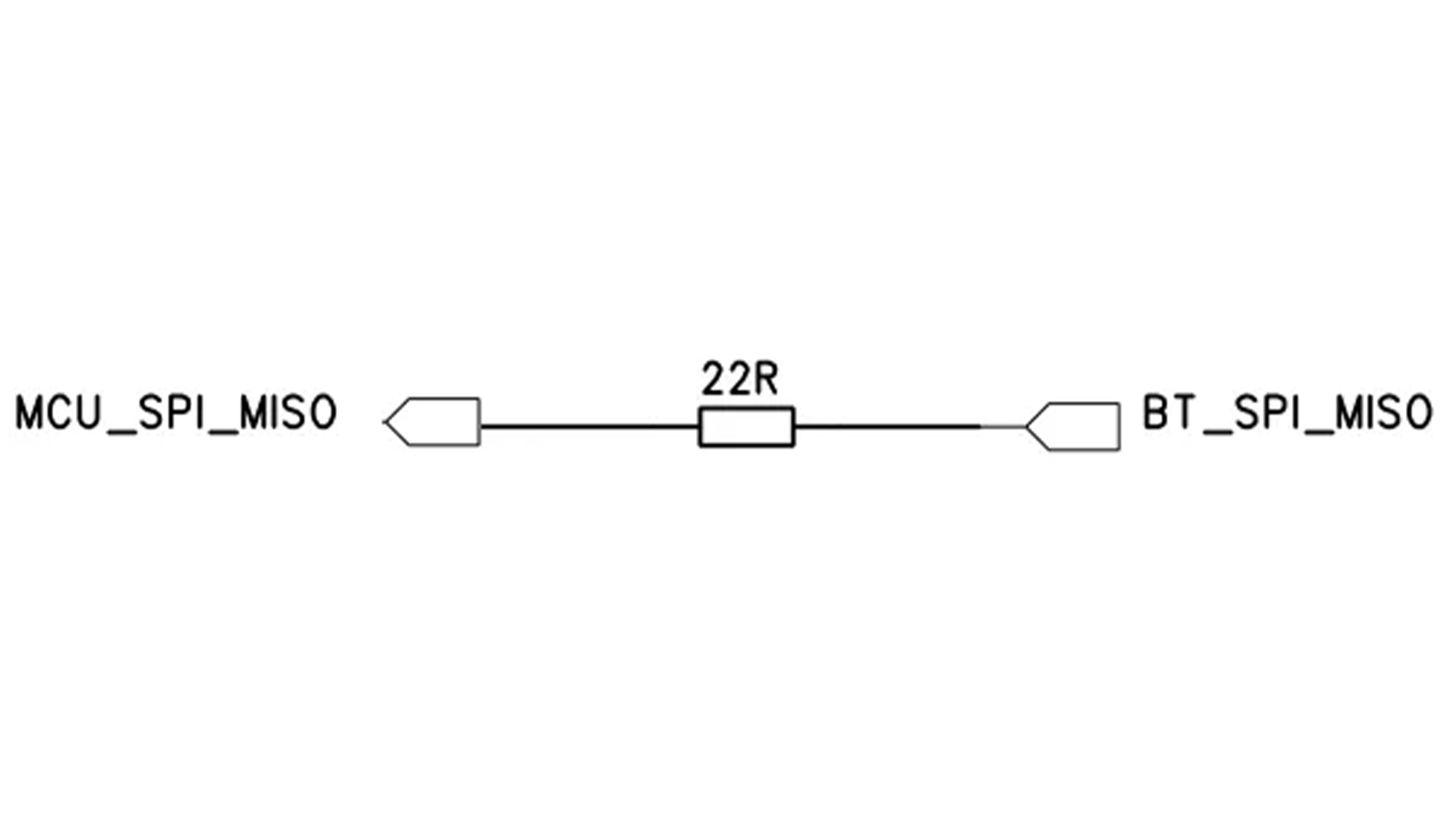
在用于与外围设备进行 SPI 总线通信的电路中,通常会将一个阻值为几十欧姆的小电阻与信号线串联,如图 1 所示。这种设计实现了以下功能:1. 阻抗匹配。当SPI信号线较长或负载电容较大时,信号可能在传输线末端发生反射,导致波形振荡(振铃)或过冲/欠冲。串联电阻在信号源端(通常靠近主设备端)起到阻抗匹配的作用,吸收...
阅读更多
惯性导航系统(INS)在自动驾驶技术中发挥着至关重要的作用,尤其是在弥补GPS、摄像头和激光雷达等其他传感器的不足方面。它提供连续、高频且不受干扰的运动状态信息,是自动驾驶感知和定位的核心组成部分之一。 惯性导航系统的核心功能 惯性导航系统在自动驾驶中的核心功能是感知车辆的运动状态,测量车辆的三维位置、速...
阅读更多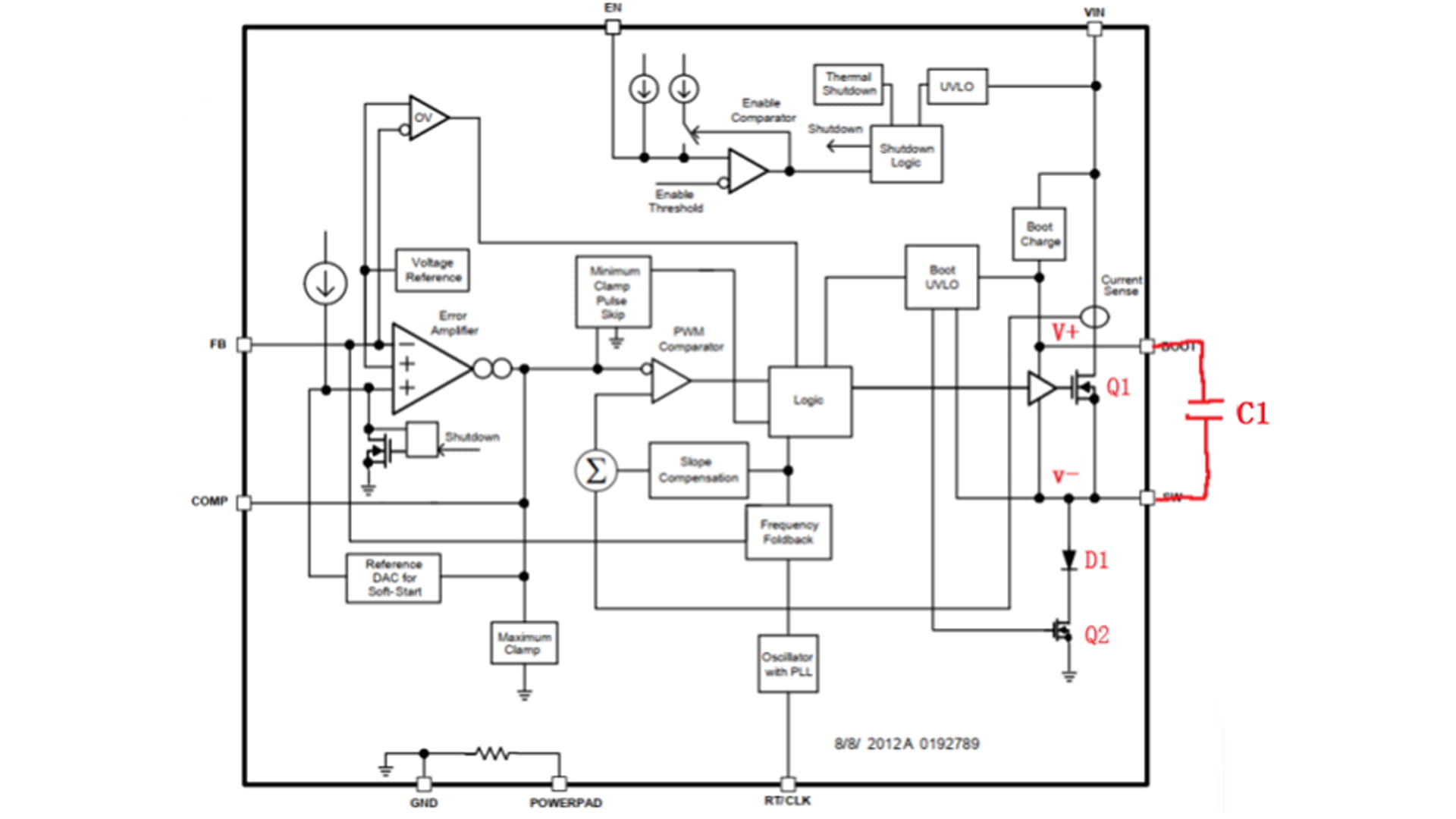
图 1 BUC 电源通常,在设计异步降压电源时,会在芯片的SW和BOOT引脚之间连接一个自举电容,例如图1中的C1。自举电容利用了其两端电压不会突然变化的特性。当电容两端保持一定的电压时,即使增加电容负极的电压,正极的电压仍然保持在与负极电压相同的初始值,从而提高驱动电压。图 2 降压芯片内部结构图如图 2 所示的降压芯...
阅读更多
在高精度倾角测量系统的设计中,误差控制是决定系统性能的关键。本文结合现有研究成果和工程实践,从四个方面探讨了误差控制的实现方法、误差来源、分析方法和解决方案,为高精度倾角测量系统的设计和优化提供参考。反映水平面与 Y 轴之间的角度。2. 主要误差来源分析1) 环境干扰误差⚪机械振动:当传感器安装在振动环境中...
阅读更多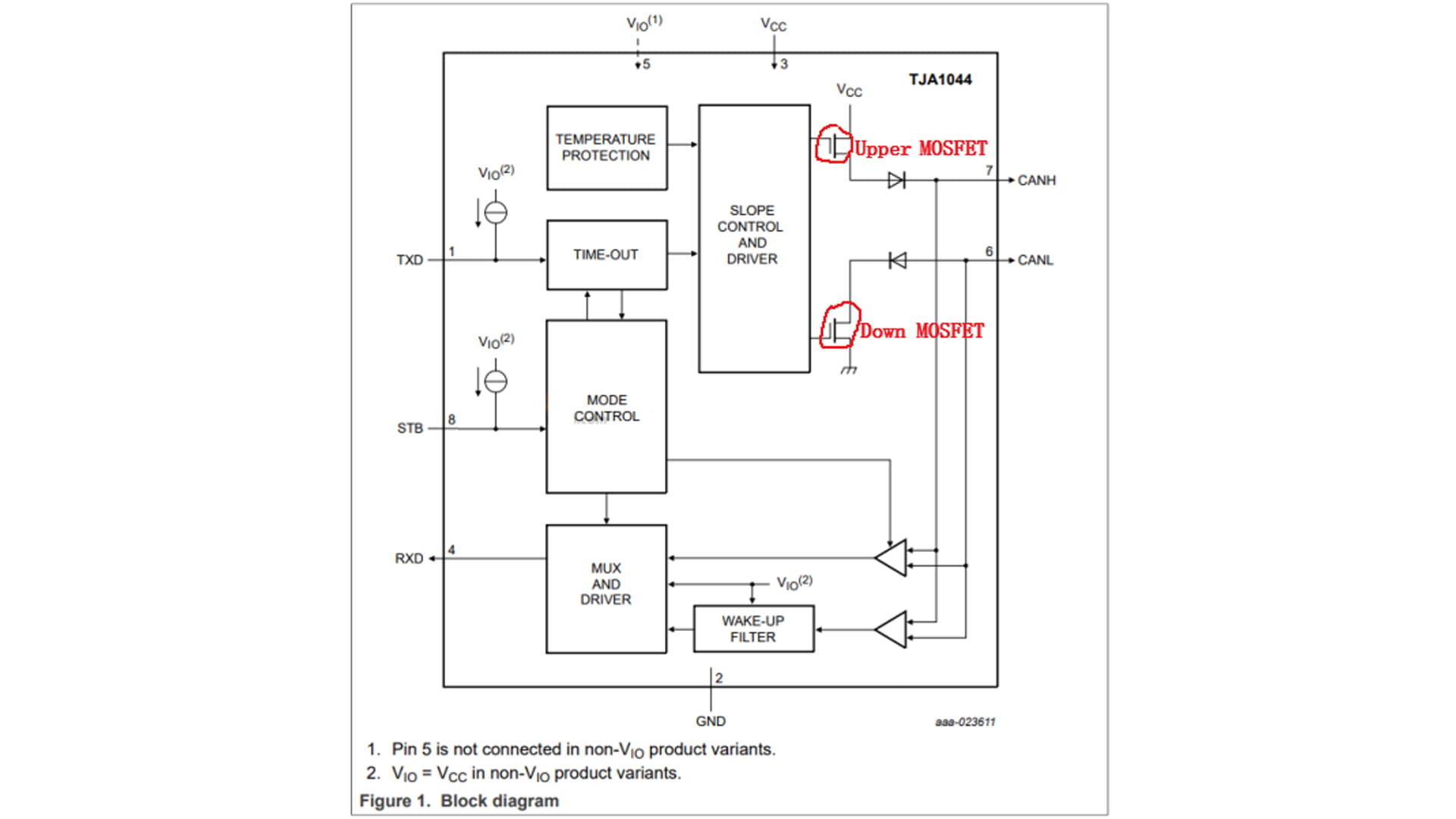
如图1所示,在CAN总线的实际应用中,需要在总线的两端连接一个120Ω的电阻。那么,使用120Ω电阻的依据是什么呢?图 1下面我们以TJA1044的内部结构图为例进行分析。图 2CAN总线的特性是显性状态代表0,隐性状态代表1。当总线处于隐性状态时,TJA1044内部的上下晶体管Q1和Q2均处于截止状态,CANH和CANL引脚处于非激活状态,电...
阅读更多
Micro-Magic 公司推出了一款专为导航系统设计的高精度惯性测量单元 (IMU) UF300。该单元以尖端光纤陀螺仪技术为核心,集高精度、小型化和高可靠性于一体,专为严苛环境下的智能设备而设计。无论是无人机的灵活操控、智能驾驶的毫秒级响应,还是导弹飞行控制的极致精度,UF300 都能满足需求。其陀螺仪零偏稳定性高达 0.03°/...
阅读更多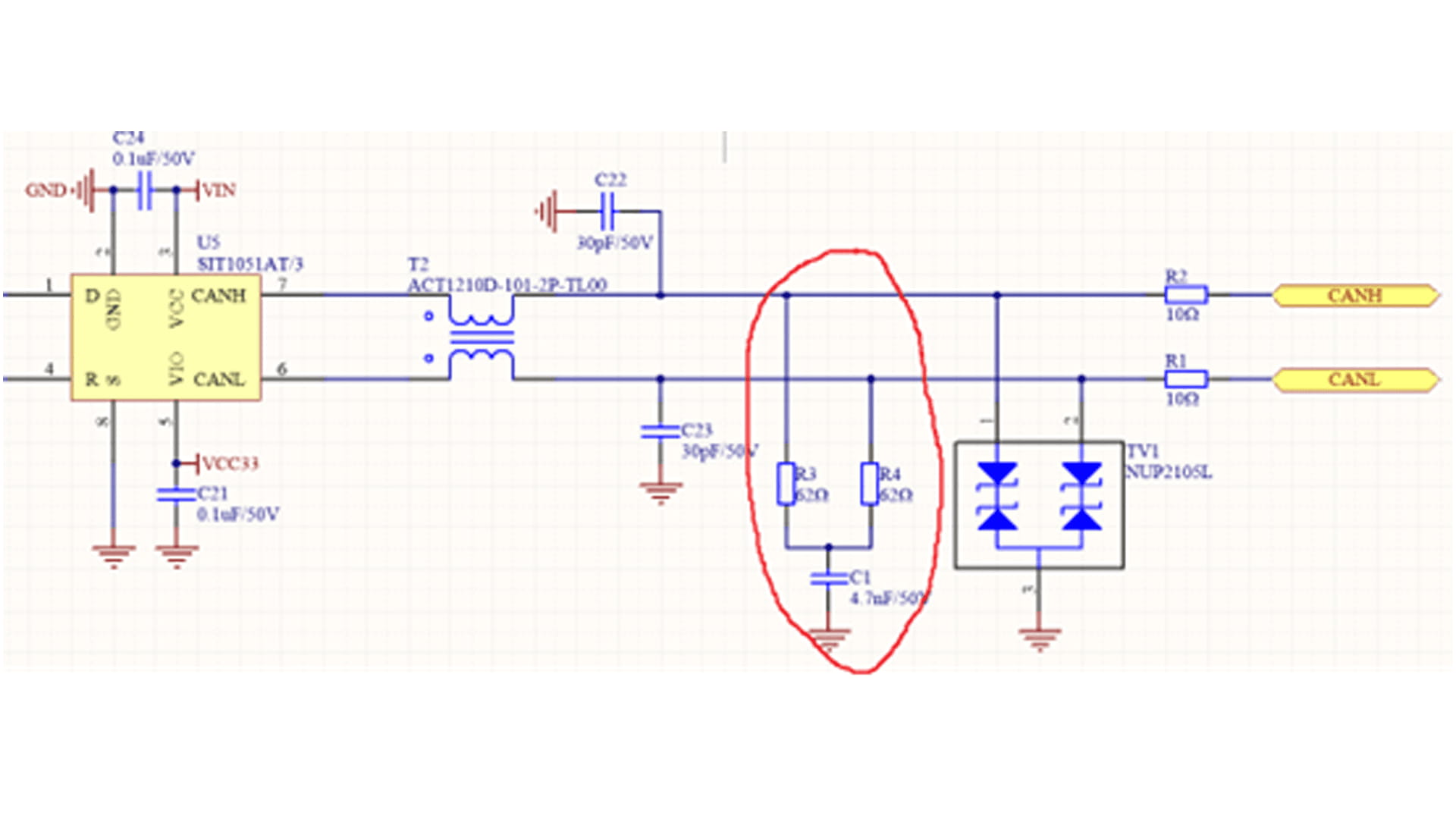
在CAN通信中,我们经常会看到如下图所示的电路设计:CAN终端电阻并非直接使用120欧姆。而是在两个62Ω电阻之间添加一个接地电容,将终端电阻“分割”成两部分,这就是分端法。图1 CAN总线接口电路这种连接方式实际上相当巧妙,它能有效降低差分信号上的外部干扰。CAN总线传输差分信号,通常对共模干扰具有很强的抵抗力。然而,...
阅读更多
在复杂多变的工业和科研领域,导航系统的精度和可靠性直接决定着任务的成败。Micro-Magic Inc.推出的IF3900系列高精度光纤惯性导航系统,凭借其突破性的技术设计和卓越的性能,为航空航天、自动驾驶、海洋勘探和无人机导航等高端应用场景提供了创新解决方案。IF3900系列产品配备高精度闭环光纤陀螺仪和高精度石英加速度计,...
阅读更多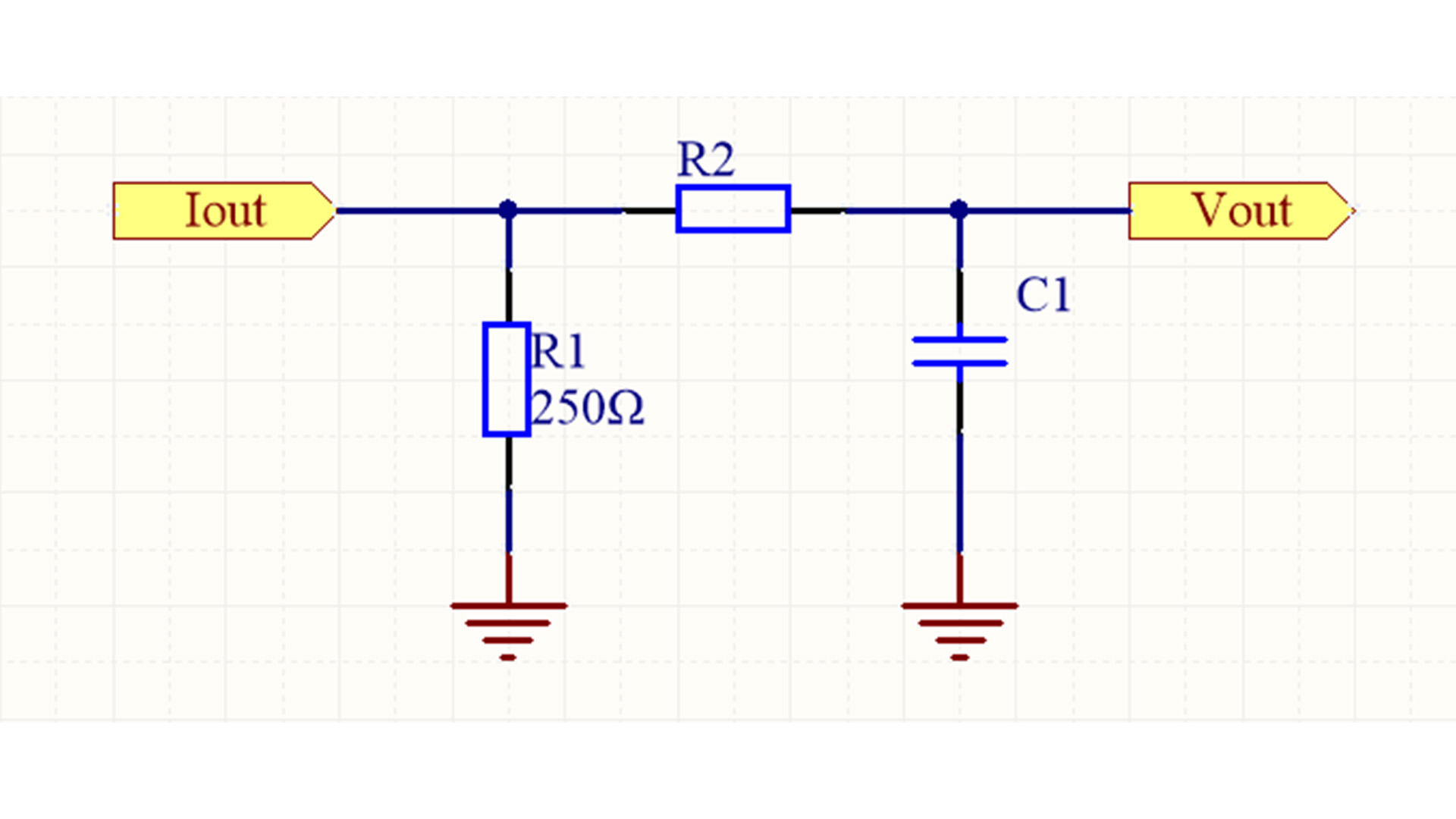
前文提到,为了抑制高频噪声的影响,4-20mA电流采样电路需要在ADC采样前增加一个RC低通滤波器。本文采用图1所示的RC低通滤波器电路,其中R2为1.6KΩ,C1为0.1μF,截止频率fc约为1kHz。图 1 RC 低通滤波器以下分析通过实际计算检验其噪声抑制能力,以 200Hz 带内信号和 5kHz 带外噪声信号为例,计算其幅频响应。图 2 显示了典...
阅读更多
中国惯性技术领域取得了显著进展——杭州麦新敏微科技近日宣布,其高性能惯性导航系统IF3700已成功应用于业界领先的“天航智能”新一代高端工业无人机平台。此次合作标志着国产高精度惯性传感器在复杂环境适应性和长期稳定性等关键指标上取得了全面突破,为工业无人机在严苛场景下的可靠运行提供了核心保障。在电力巡检、高空测...
阅读更多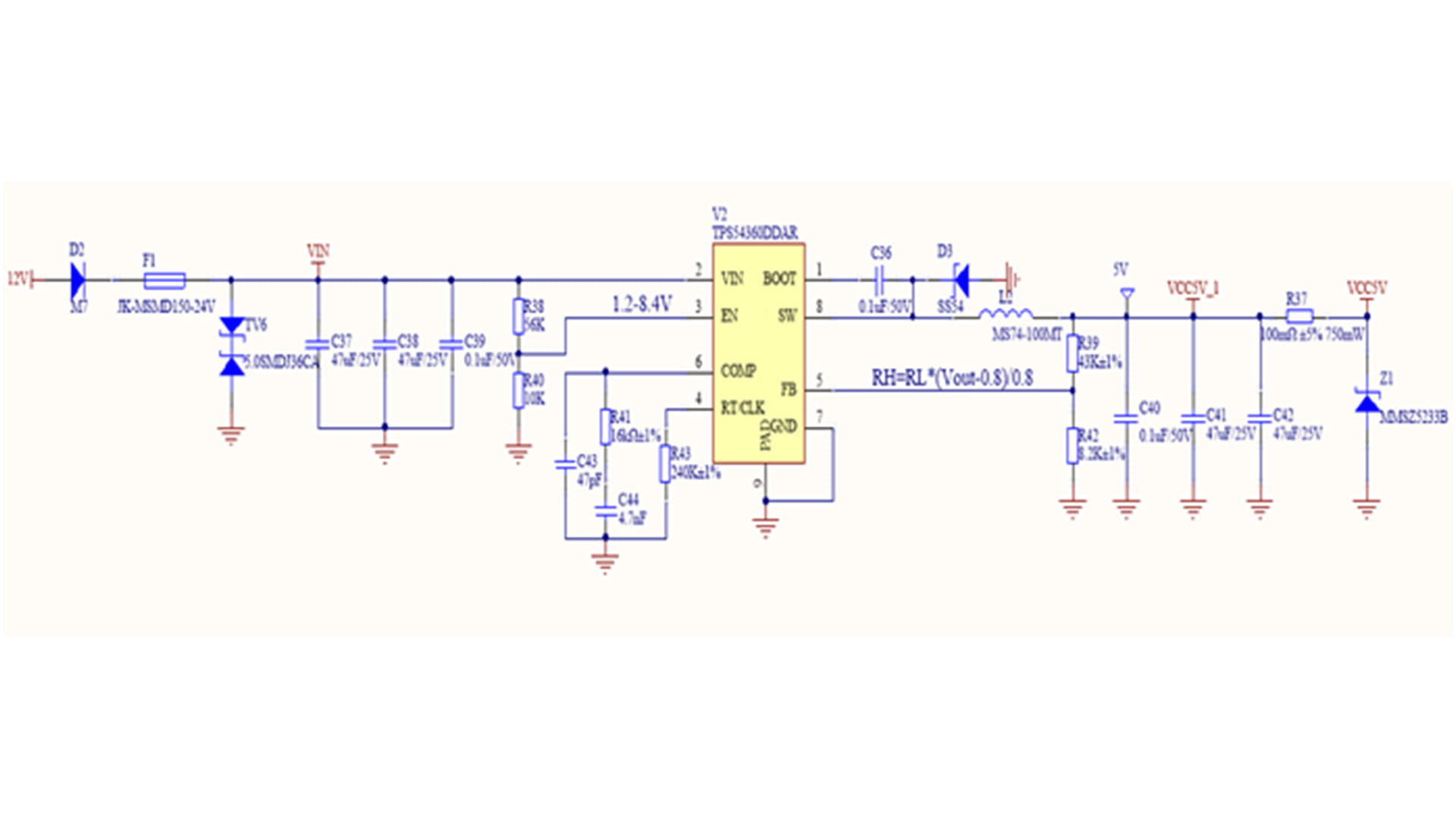
图 1. 非同步 BUCK 转换器拓扑结构图 1 显示了异步 BUCK 转换器的拓扑结构。异步 BUCK 转换器芯片通常只在内部集成高侧 MOSFET。当高侧 MOSFET 关闭时,需要在 SW 引脚和 GND 之间安装一个续流二极管,作为功率电感的续流路径。续流二极管的选择必须至少满足以下两个硬性标准(1)(2)和两个优化标准(3)(4):(1)续流...
阅读更多

 CN
CN






 网络支持
网络支持

