请选择您的语言 :
社交分享 :
CN
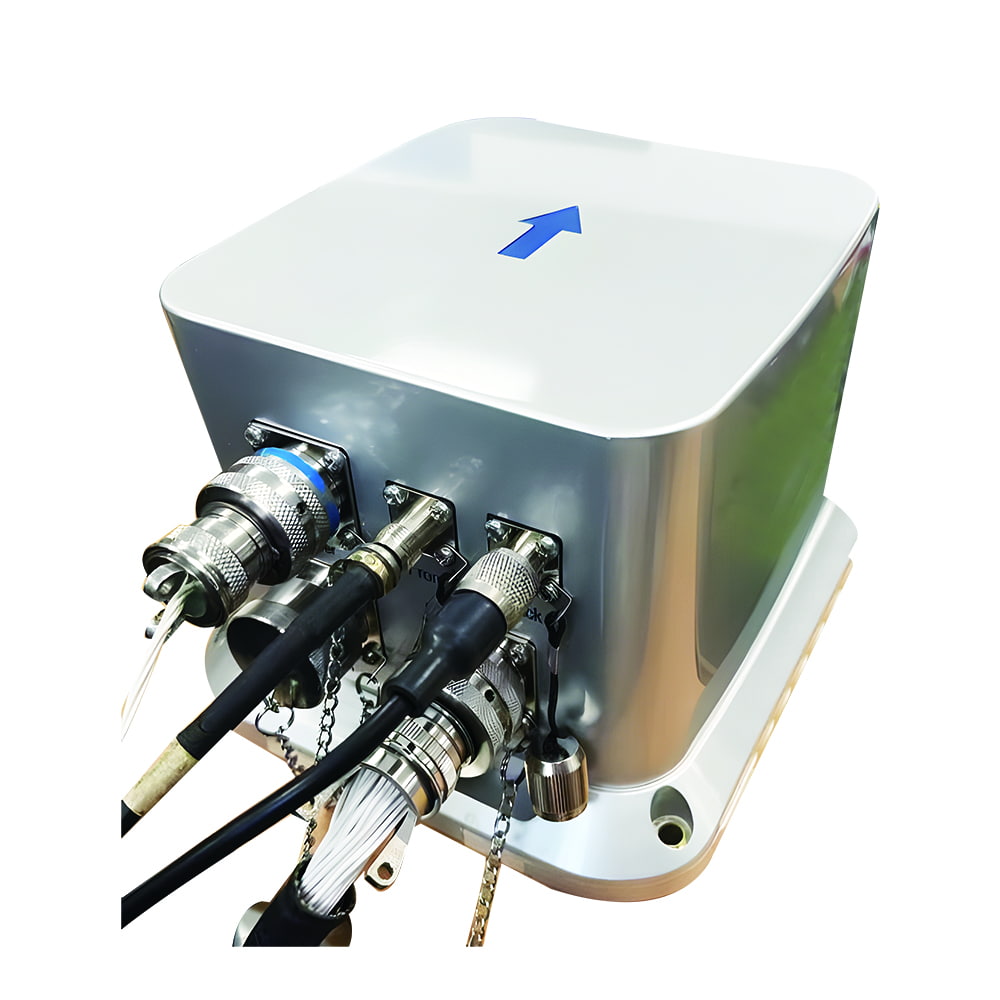
高精度光纤惯性导航系统双GNSS+INS RTK模块
IF3500是自主研发的 光纤惯性导航系统 体积小、精度高,可实现0.1米精度的自主寻北。°该系统由一个零偏稳定性为 0.015 的光纤陀螺仪组成。°本产品配备高精度石英晶体加速度计和支持北斗功能的全系统多频卫星模块,可独立搜索北方,并支持单天线和双天线组合。此外,还搭载了优秀的导航融合算法,针对卫星遮挡、多径干扰等情况进行了优化。
零件编号 :
订单(最小起订量) :
产品系列及参数
生产过程
产品尺寸
应用场景
常问问题
Xml 隐私政策 博客 网站地图
网络支持
留言
扫码到微信 :
家
产品
WhatsApp
联系我们





















 CN
CN













 网络支持
网络支持

