




本产品内置三轴集成高精度光纤陀螺仪、三轴高精度石英柔性加速度计和移动测绘级多模多频GNSS接收机,支持自主北斗功能。通过先进的智能组合导航算法和卡尔曼滤波,针对GNSS遮挡和多径干扰进行了优化,可实现移动载体的高精度航向、姿态、速度和位置测量。
该惯性导航系统还具有 GNSS/里程计/DVL/气压高度计等多种传感器接口,能够很好地满足城市峡谷等复杂环境下长期、高精度、高可靠性的导航应用要求,并可用于各种无人系统的导航和控制。
产品特性包括:快速准确地确定初始航向和姿态,支持实时航向和姿态输出,内置GPS和北斗双模接收机,支持动态快速对准,INS/GNSS组合集成设计,支持IE后处理,增强型卡尔曼滤波算法,以及抗电磁干扰和抗振动能力。可应用于车载、机载、船舶导航、稳定性控制等领域。
零件编号 :
IF3600订单(最小起订量) :
1产品系列及参数
| INS/GNSS 集成导航精度 | ||||
| 姿态准确性 | 航向:≤0.02° (1σ) | |||
| 俯仰/横滚:≤0.005° (1σ) | ||||
| 位置精度 | 单点定位:≤2米(50% CEP) | |||
| RTK:≤2cm + 1ppm(50% CEP) | ||||
| 速度精度 | ≤0.02米/秒(1σ) | |||
| 校准时间 | 获取纬度、经度和海拔后开始。对准时间:≤5分钟。 | |||
| INS/里程表/DVL 集成精度 | 0.25% × 里程数(取决于里程表或车辆登记证的准确性) | |||
| 纯惯性导航精度 | ||||
| 姿态准确性 | 方位角对准:≤0.1°sec(Φ)(1σ,Φ:当地纬度) | |||
| 水平对齐:≤0.008° (1σ) | ||||
| 方位角维护:0.03°/小时(1σ) | ||||
| 水平保持:0.02°/h (1σ) | ||||
| 位置精度 | ≤1 海里/小时(50% CEP) | |||
| 关键部件特性 | ||||
| 陀螺仪 | 范围 | ±500°/秒 | 偏差稳定性 | 0.03°/h (1σ) |
| 加速度计 | 范围 | ±20克 | 偏差稳定性 | ≤20μg (1σ) |
| 物理特性 | 界面特性 | |||
| 电源电压 | 24V 直流标称值(12–32V 直流) | 接口类型 | 4 个串口(RS232/RS422) | |
| 功耗 | <20瓦 | 支持的信号:PPS、EVENTMARK 输入/输出 | ||
| 工作温度 | -40℃至+60℃ | 传输速率 | 9600–921600 bps(可配置) | |
| 防护等级 | IP65 | 用户模式 | ||
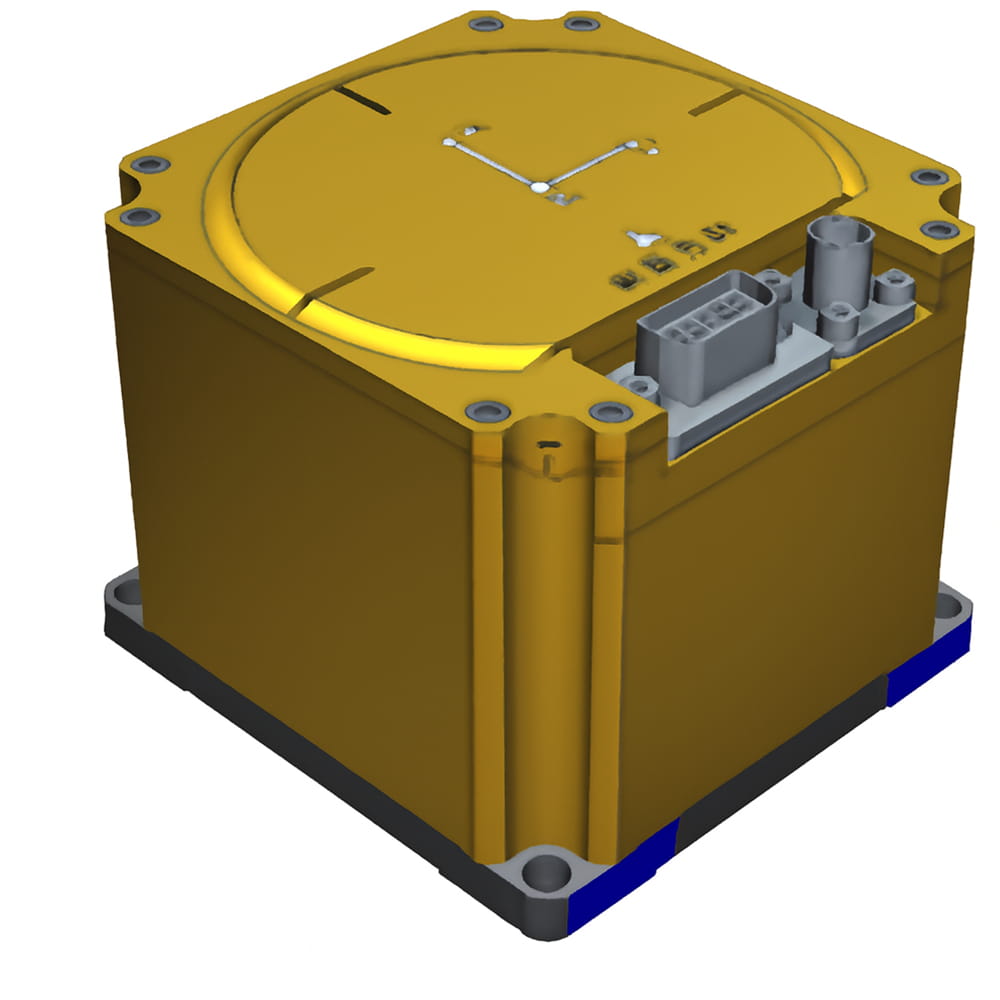
| 方面 | ≤136mm ×136mm × 150mm | |||
| 重量 | ≤3.8公斤 | 车载(默认)、空降、舰载 | ||
生产过程
产品尺寸

应用场景



常问问题












 CN
CN













 网络支持
网络支持

