



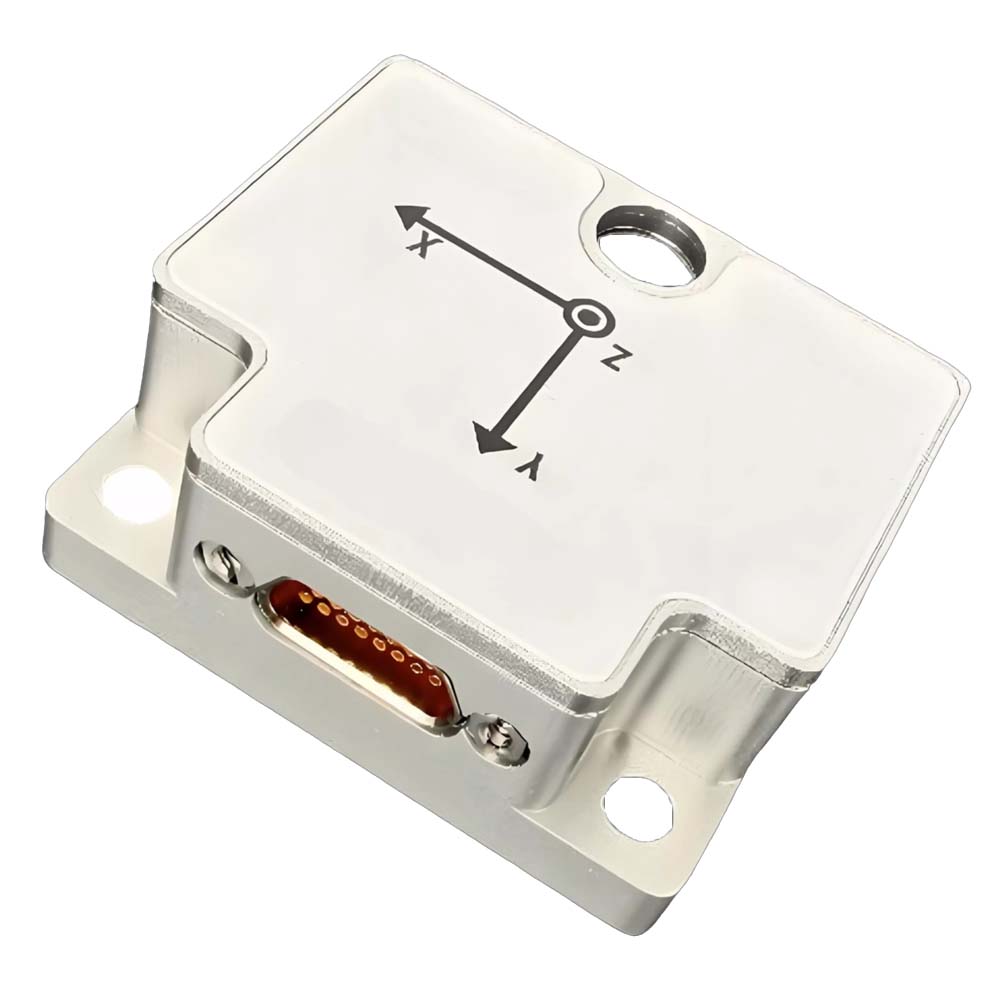
U3500系列是一款IMU/VRU/AHRS传感器,由高性能MEMS-IMU、磁力计和增强型单轴陀螺仪组成。它配备了自主研发的自适应扩展卡尔曼滤波器、IMU噪声动态分析算法和载体运动状态分析算法,能够在高动态条件下满足姿态角精度要求,并降低航向角漂移。
每个传感器在出厂前都会经过精细的补偿,包括温度、零点偏差、比例因子和交叉轴补偿。
U3500系列传感器通过UART接口传输数据,并具有丰富的用户配置选项。如果需要CAN接口,用户需自行集成CAN收发器电路。U3500系列可通过外部触发与系统同步,也可通过同步输出功能与雷达、摄像头等外部系统同步。多功能上位机(GUI)可帮助用户快速评估产品,功能包括但不限于模块配置、数据显示、固件升级、数据记录等。
零件编号 :
U3500订单(最小起订量) :
1产品系列及参数
| 姿态精度 | U3500-A | U3500-B | U3500-C | U3500-D | U3500-E | U3500-F | 单元 |
| 俯仰角(±90°)/横滚角(±180°)(静态) | 0.15(标称值),0.2(最大值) | ° | |||||
| 俯仰角(±90°)/横滚角(±180°)(动态) | 0.15(标称值),0.2(最大值) | ° | |||||
| 偏航角(±180°)静态漂移 2 小时(6 自由度)① | 0.15(标称值),0.2(最大值) | ° | |||||
| 偏航(±180°)动态漂移(6自由度)② | 9 | 5 | ° | ||||
| 磁辅助(AHRS)③ | / | / | / | 2(nom), 3(最高) |
/ | 2(nom), 3(最高) |
° |
| 偏航旋转误差(6自由度)(旋转速度低于100°/s)④ | 3(最高) | <0.8(标称值),1.5(最大值) | 1(最大值) | ° | |||
| 解决 | 0.01 | ° | |||||
| 笔记: | |||||||
| ①:该模块保持静止状态 2 小时。 ②:测量是在模块于室内清洁机器人上运行1小时后进行的。1σ ③:经过地磁校准后,在没有周围磁场干扰的情况下进行测量,并且需要将产品配置为 AHRS 模式。 ④:转盘连续旋转10圈,导致航向角出现累积误差 |
|||||||
| 陀螺仪 | U3500-A | U3500-B | U3500-C | U3500-D | U3500-E | U3500-F | 单元 |
| 测量范围 | ±2000 | ±400 ±2000(最大值) |
±4000 | 度/秒 | |||
| 解决 | 16 | 20 | 少量 | ||||
| 比例因子(100°/s)① | <600(标称值) 800(最大值) |
< 280(标称值) 300(最大值) |
< 250(标称值) 300(最大值) |
每百万 | |||
| 非线性② | ±0.05 | %Fs | |||||
| 3dB带宽 | 80 | 80(标称值) 400(最大值) |
Hz | ||||
| 采样率 | 1000 | Hz | |||||
| 零偏差不稳定性(Allan,1σ) | 3 | X、Y:3 Z:2 |
X,Y: 1.6 Z:2 |
1.5 | 摄氏度/小时 | ||
| 零偏差稳定性(10秒,1σ) | 10 | X、Y:10 Z:4.2 |
X、Y:5 Z:4.2 |
3.5 | 摄氏度/小时 | ||
| 零偏差重复性(1σ) | 14.5 | X、Y:14.5 Z:5.5 |
X、Y:8.2 Z:5.5 |
3 | 摄氏度/小时 | ||
| 角度随机游走(Allan,1σ) | 0.42 | X,Y: 0.42 Z:0.07 |
X,Y: 0.25 Z:0.07 |
0.08 | °/√h | ||
| 全温零偏压-40~85℃ | 0.1(标称值),0.3(最大值) | ||||||
| 加速度计灵敏度 | 0.1 | 0.05 | °/s/g | ||||
| 笔记: ①:将转盘沿两个方向各旋转10次,并取平均值。 ②:指定范围内与最佳拟合线的最大偏差 |
|||||||
| 加速度计 | U3500-A | U3500-B | U3500-C | U3500-D | U3500-E | U3500-F | 单元 |
| 测量范围 | 12 | 8 32(最大值) |
g | ||||
| 解决 | 16 | 20 | 少量 | ||||
| 初始偏差漂移① | 5(最高) | 2(nom) 5(最高) |
mg | ||||
| 非线性 | 0.5 | 0.01 | %Fs | ||||
| 3dB带宽 | 145 | 90(标称值) 400(最大值) |
Hz | ||||
| 采样率 | 1600 | 1000 | Hz | ||||
| 零偏差不稳定性(Allan,1σ) | 0.03 | 0.018 | 0.01 | mg | |||
| 零偏差稳定性(10秒,1σ) | 0.07 | 0.035 | 0.012 | mg | |||
| 零偏差重复性(1σ) | 0.24 | 0.13 | 0.09 | mg | |||
| 角度随机游走(Allan,1σ) | 0.08 | 0.04 | 0.017 | 米/秒/√h | |||
| 全温零偏压-40-85℃ | 3(标称值)~10(最大值) | mg | |||||
| 笔记: ①:此值在用户安装后会发生变化,以实际值为准。 |
|||||||
| 磁力计 | U3500-A | U3500-B | U3500-C | U3500-D | U3500-E | U3500-F | 单元 |
| 范围 | / | / | / | 20 | / | 20 | 高斯 |
| 采样 | / | / | / | 200 | / | 200 | Hz |
| 线性 | / | / | / | 0.1 | / | 0.1 | 联邦百分比 |
| 温度传感器 | U3500-A | U3500-B | U3500-C | U3500-D | U3500-E | U3500-F | 单元 |
| 范围 | -104(最小值)- 150(最大值) | ℃ | |||||
| 偏移误差 | ±1 | K | |||||
| 机械/环境 | U3500-A | U3500-B | U3500-C | U3500-D | U3500-E | U3500-F | 单元 |
| 电源 | 3.3 - 5.5/ 6.5(最高) | V | |||||
| IO 到 GND | -0.3 ~ 5 | V | |||||
| 功耗 | 240 | 245 | 300 | 200 | mW | ||
| 工作/储存温度 | -40 ~ +85 | ℃ | |||||
| 陀螺仪范围 | ±2000 | Z:±400① XY轴:±2000 |
±2000(标称值) ±4000(标称值) |
度/秒 | |||
| 加速度计范围 | ±12(标称值) ±24(最大值) |
±8(标称值) ±32(最大值) |
g | ||||
| 开始时间② | 2 | s | |||||
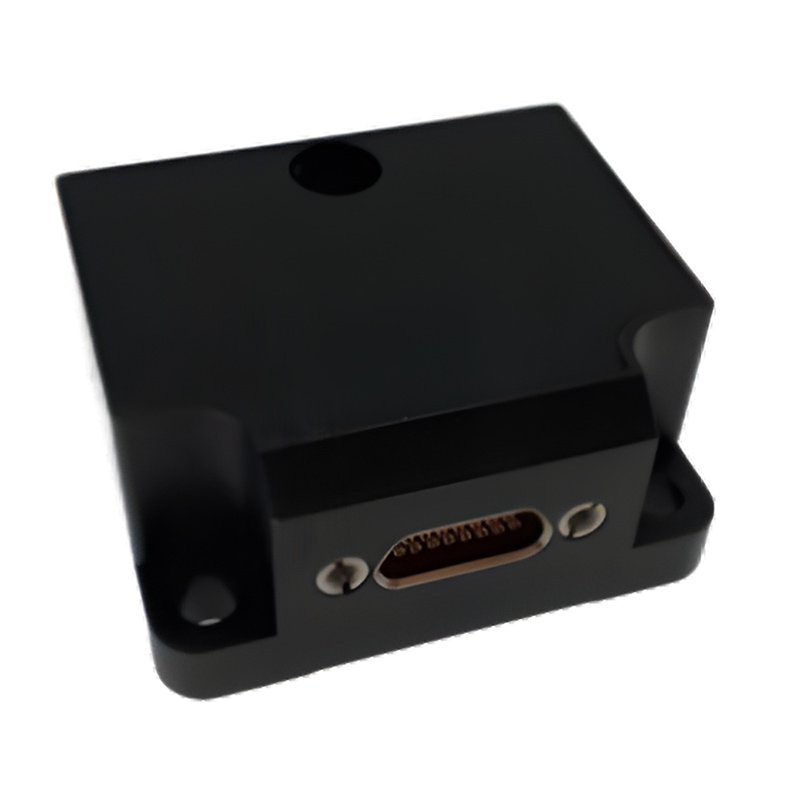
| 尺寸 | Molex接口:22*22*10 板对板接口:22*22*9 |
mm | |||||
| 重量 | <8 | g | |||||
| 壳体材料及工艺 | 铝合金CNC | ||||||
| 组装螺丝 | M2.5 | ||||||
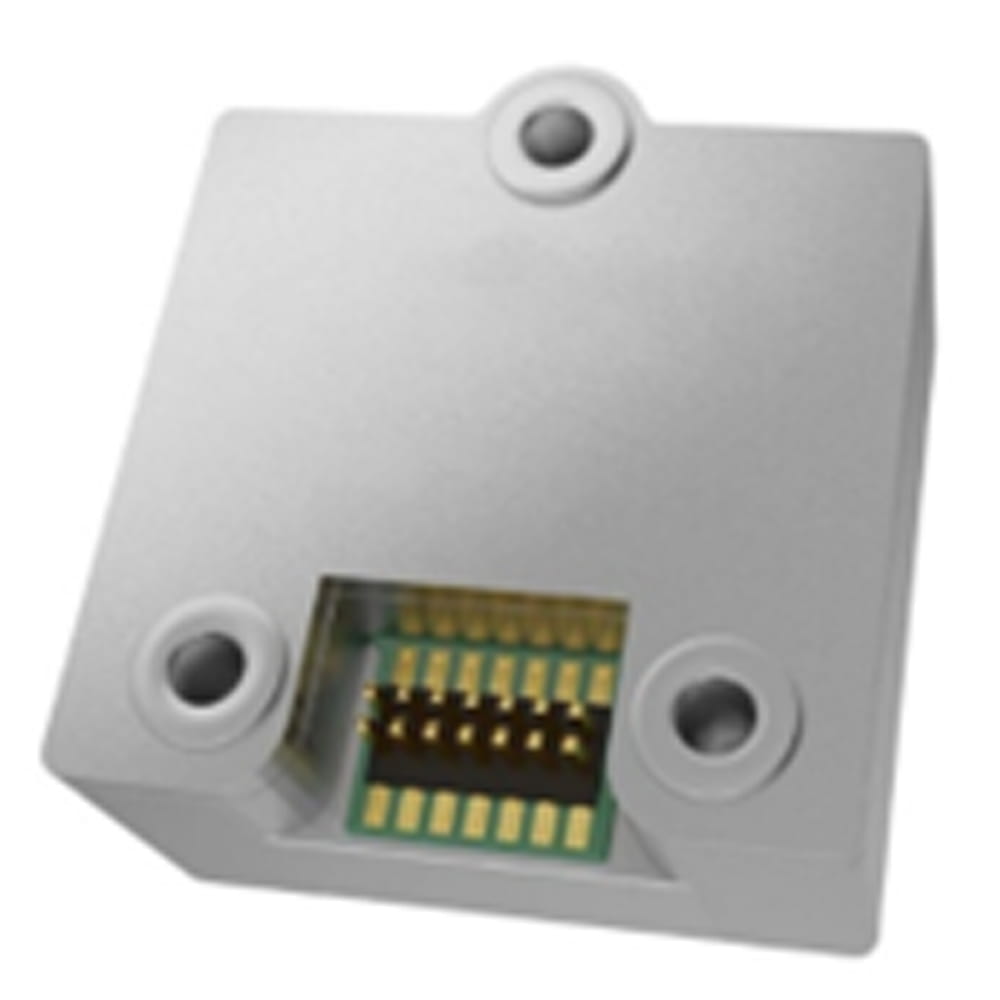
| 连接器型号 | Molex连接器:Molex 5015680807 板对板连接器:2x8P,引脚间距1mm |
||||||
| 防震 | 1.0mm(10Hz-58Hz)&≤20g(58Hz-600Hz) | ||||||
| 冲击(持续时间) <1毫秒) | 2000 | g | |||||
| 环境保护 | RoHS 指令 2011/65/EU | ||||||
| EMC | 低电压指令 2014/35/EU | ||||||
| 跌落测试 | 在75厘米高的实验平台上自由落体3次 | ||||||
| 温度冲击 | 在1小时内将温度从-40℃升至85℃,共5次 | ||||||
| 笔记: ①:U3500-B/C/D 配备了高抗振单轴陀螺仪,在以下范围内性能最佳: <400°/秒。 ②:启动时间是指从系统上电到输出有效数据所需的时间。在此期间,模块应保持静止状态。 |
|||||||
| 界面 | 范围 | 健康)状况 | 敏 | 普通的 | 最大限度 | 单元 |
| UART(TTL) | 波特率 | 9600 | 115200 | 921600 | bps | |
| 起始位置 | 0 | 1 | 少量 | |||
| 数据长度 | 0 | 8 | 比特 | |||
| 停止位 | 1 | 少量 | ||||
| 校验和 | 没有任何 | 少量 | ||||
| 输出帧率① | 0 | 100 | 1000 | Hz | ||
| 逻辑电压 | 高的 低的 |
2 | 3.3 | 3.6 0.6 |
V | |
| 能 | 波特率② | 125 | 500 | 1000 | 千比特/秒 | |
| 输出帧率③ | 5 | 100 | 200 | Hz | ||
| 逻辑电压 | 高的 低的 |
2 | 3.3 | 3.6 0.6 |
V | |
| IO | 逻辑电压 | 高的 低的 |
2 | 0.6 | V | |
| 延迟(触发功能)④ | 从触发生成到数据传输 | 800 | us | |||
| 笔记: ①:该传感器支持以 1、5、10、50、100、200、250、500 和 1000Hz 的频率输出数据。 ②:CAN 通信支持的波特率为 125K、250K、500K 和 1000K。 ③:传感器的 CAN 通信支持 5、10、50、100、200 和 1000Hz 的数据输出。 ④:有关多功能IO操作和配置,请参阅说明和编程手册。 |
||||||
生产过程
产品尺寸

应用场景



常问问题













 CN
CN












 网络支持
网络支持

