



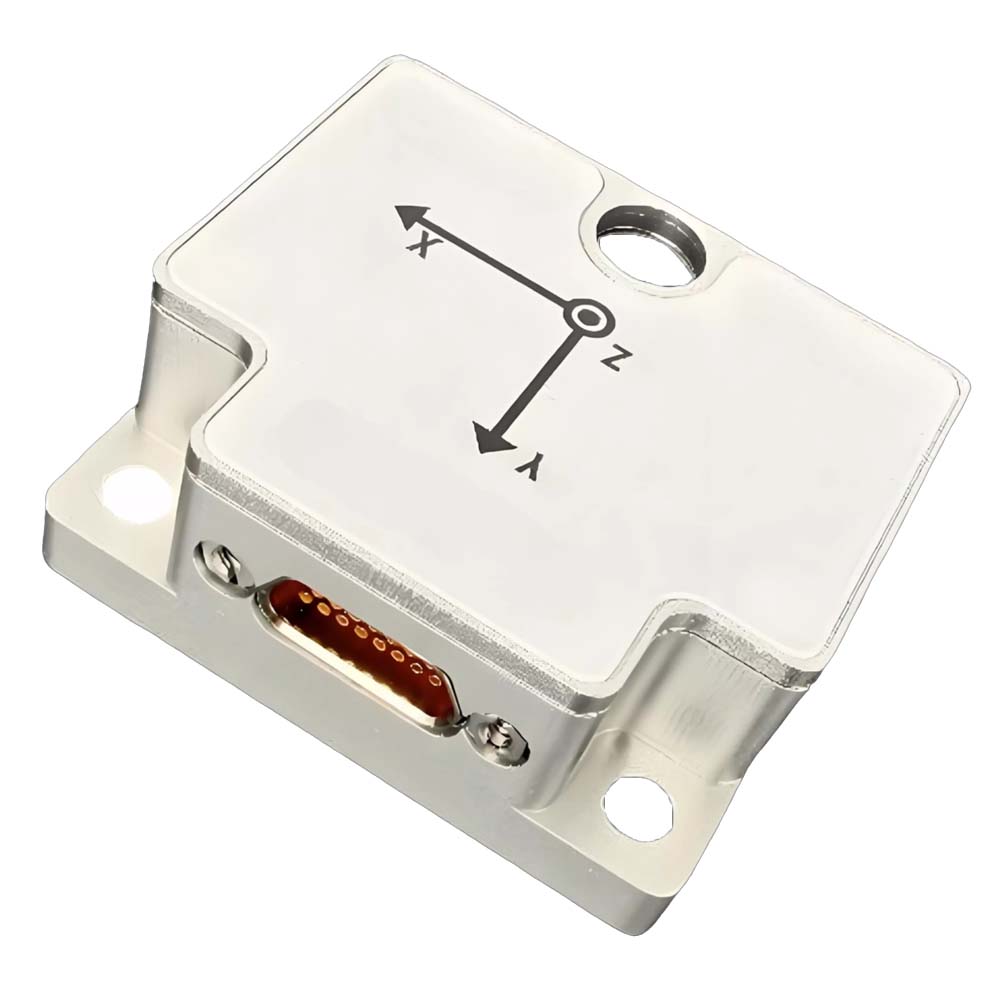
U6488系列惯性测量单元(IMU)内置三轴陀螺仪和三轴加速度计,用于测量载体的三轴角速率和三轴加速度。经误差补偿(包括温度补偿、安装偏差补偿、非线性补偿等)后,陀螺仪和加速度计的数据通过串口按照约定的通信协议输出。它们可用于载体的精确导航、控制和动态测量。本产品采用高精度MEMS惯性器件,具有体积小、过载能力强、可靠性高、硬度高等特点,即使在恶劣环境下也能精确测量运动载体的角速率和加速度信息。
U6488系列包含四款型号:U6488-B、U6488-C、U6488-D和U6488-E。这四款型号外观和接口性能一致。除U6488-E外,其余型号均内置三轴磁力计和数字气压计。
零件编号 :
U6488订单(最小起订量) :
1产品系列及参数
| 范围 | U6488-A | U6488-B | 单元 | |
| 陀螺仪 | ||||
| 动态范围 | ±450 | ±450 | 度/秒 | |
| 偏差稳定性 | 艾伦方差 | 1 | 0.8 | 摄氏度/小时 |
| 10 秒平均值(-40~+85°C,固定温度) | 4 | 5 | 摄氏度/小时 | |
| 随机漫步 | 0.1 | 0.065 | º/√h | |
| 偏见重复 | 4 | 5 | 摄氏度/小时 | |
| 拜斯 | 全温度范围内的偏差变化1 | ±0.04 | ±0.05 | 度/秒 |
| 振动条件下的偏差变化2 | 6 | 6 | 摄氏度/小时 | |
| 尺度因子非线性 | 100 | 100 | 每百万 | |
| 解决 | 3.052*10-7 | 3.052*10-7 | º/s/LSB | |
| 带宽 | 200 | 260 | Hz | |
| 加速度计 | ||||
| 动态范围 | ±16 | ±20 | g | |
| 偏差稳定性 | 艾伦方差 | 0.03 | 0.02 | mg |
| 10 秒平均值(-40~+85°C,固定温度) | 0.06 | 0.05 | mg | |
| 随机漫步 | 0.01 | 0.05 | 米/秒/√h | |
| 偏见重复 | 0.06 | 0.08 | mg | |
| 尺度因子非线性 | 100 | 100 | 每百万 | |
| 解决 | 1.221*10-8 | 1.221*10-8 | 克/LSB | |
| 带宽 | 200 | 260 | Hz | |
| 磁力计 | ||||
| 动态范围 | ±2 | ±8 | 高斯 | |
| 解决 | 120 | 200 | uGauss | |
| 噪声均方根值 | 10赫兹 | 50 | 50 | uGauss |
| 带宽 | 200 | Hz | ||
| 晴雨表 | ||||
| 压力范围 | 450 | 1100 | 毫巴 | |
| 解决 | 0.1 | 0.1 | 毫巴 | |
| 绝对精度 | 1.5 | 1.5 | 毫巴 | |
| 通信接口 | ||||
| 1通道SPI | 波特率 | 25 | 25 | MHz |
| 1通道UART | 波特率 | 230.4 | 230.4 | 千比特/秒 |
| 采样率 | SPI | 2000 | 2000 | Hz |
| UART | 200 | 200 | Hz | |
| 电子特性 | ||||
| 电压 | 3.3±0.3 | V | ||
| 功耗 | 1.5 | W | ||
| 涟漪波 | PP | 100 | mV | |
| 物理特性 | ||||
| 方面 | 47*44*14 | mm | ||
| 重量 | 50 | 克 | ||
生产过程
产品尺寸


应用场景



常问问题













 CN
CN












 网络支持
网络支持

